





格式:pdf
大小:1.1MB
頁數(shù): 5頁
研究了一種基于機(jī)器視覺的無人機(jī)著陸參數(shù)計(jì)算方法,通過利用圖像處理得到的地平線、跑道兩條邊緣線在圖像像素坐標(biāo)系下的直線方程,可以獲得無人機(jī)著陸過程中的5個(gè)飛行參數(shù):高度、側(cè)偏距、滾轉(zhuǎn)角、俯仰角、偏航角。介紹了視覺測量的一般理論;給出了飛行姿態(tài)角測量方法;提出了無人機(jī)高度和與機(jī)場跑道中線的距離的計(jì)算方法。利用實(shí)拍的一段無人機(jī)著陸視頻驗(yàn)證了提出的方法,實(shí)驗(yàn)研究表明:該方法可以有效地獲得5個(gè)飛行參數(shù),為無人機(jī)自主著陸提供著陸參數(shù)。
格式:pdf
大小:106KB
頁數(shù): 10頁
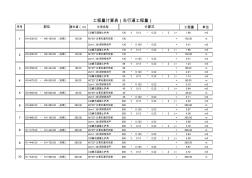
序號(hào) 路長度( m) 分項(xiàng)名稱 工程量 單位 C20細(xì)石混凝土護(hù)角 130 *( 0.13 * 0.22 / 2 )= 1.86 m3 K0+030.00 ~ K0+160.00 (右側(cè)) 130.00 60*25*12青石道牙安裝: 130 = 130.00 m 2cm1:3水泥砂漿找平 130 * 0.120 * 0.02 = 0.31 m3 C20細(xì)石混凝土護(hù)角 130 *( 0.13 * 0.22 / 2 )= 1.86 m3 K0+200.00 ~ K0+330.00 (右側(cè)) 130.00 60*25*12青石道牙安裝: 130 = 130.00 m 2cm1:3水泥砂漿找平 130 * 0.120 * 0.02 = 0.31 m3 C20細(xì)石混凝土護(hù)角 86 *( 0.13 * 0.22 / 2 )= 1.23 m3 K0+358.00 ~ K0+444.00 (右側(cè)) 86
熱門知識(shí)
車行道邊緣線-
話題: 路橋市政xuexigujia
精華知識(shí)
車行道邊緣線最新知識(shí)
車行道邊緣線相關(guān)問答
車行道邊緣線車行道邊緣線相關(guān)專題
- 洗車行業(yè)利潤到底有多少
- 車行坡道坡度多少
- 車行道上裝飾井蓋
- 中國汽車行業(yè)招標(biāo)采購現(xiàn)狀
- 洗車行招標(biāo)文件
- 汽車行業(yè)生產(chǎn)線招標(biāo)文件
- 石材車行路造價(jià)
- 石材鋪裝車行路面造價(jià)
- 地下車行通道造價(jià)
- 租車行價(jià)格
- 水泥混凝土車行道與路面面包磚鋪設(shè)施工組織設(shè)計(jì)方案
- 水泥混凝土車行道與路面面包磚鋪設(shè)工程施工設(shè)計(jì)方案
- 地平線與跑道邊緣線估計(jì)無人機(jī)著陸參數(shù)
- 水泥混凝土車行道及路面面包磚鋪設(shè)施工方案
- 市區(qū)新建分析車行道、人行道
- 地平線與跑道邊緣線檢測方法
- 基于壓電堆驅(qū)動(dòng)器的噴嘴擋板式氣體控制閥
- 電氣工程及其自動(dòng)化特色專業(yè)建設(shè)探索
- 分形DGS單元結(jié)構(gòu)設(shè)計(jì)及其在微帶電路中的應(yīng)用
- 磷銨技術(shù)改造五大磷肥工程的建議
- 以大豆油多元醇制備的硬質(zhì)聚氨酯泡沫塑料的性能
- 逆變TIG焊機(jī)接觸引弧電路的設(shè)計(jì)(引弧電路)
- 預(yù)制砌塊(磚、石)擋土墻工程砌體施工安全技術(shù)交底
- 應(yīng)用模糊數(shù)學(xué)理論對公路工程建設(shè)項(xiàng)目方案的綜合評(píng)價(jià)
- 引嫩工程擴(kuò)建區(qū)土壤水鹽動(dòng)態(tài)與防治土壤鹽堿措施
- 中華華丹雨、污水管道溝槽開挖專項(xiàng)施工方案教學(xué)教材
- 中國工程圖學(xué)學(xué)會(huì)成立工程與制造系統(tǒng)集成化分會(huì)