

利用地平線與跑道邊緣線估計無人機(jī)著陸參數(shù)
格式:pdf
大小:1.1MB
頁數(shù):5P
人氣 :69
 4.4
4.4
研究了一種基于機(jī)器視覺的無人機(jī)著陸參數(shù)計算方法,通過利用圖像處理得到的地平線、跑道兩條邊緣線在圖像像素坐標(biāo)系下的直線方程,可以獲得無人機(jī)著陸過程中的5個飛行參數(shù):高度、側(cè)偏距、滾轉(zhuǎn)角、俯仰角、偏航角。介紹了視覺測量的一般理論;給出了飛行姿態(tài)角測量方法;提出了無人機(jī)高度和與機(jī)場跑道中線的距離的計算方法。利用實(shí)拍的一段無人機(jī)著陸視頻驗(yàn)證了提出的方法,實(shí)驗(yàn)研究表明:該方法可以有效地獲得5個飛行參數(shù),為無人機(jī)自主著陸提供著陸參數(shù)。



 一種地平線與跑道邊緣線檢測方法
一種地平線與跑道邊緣線檢測方法 一種地平線與跑道邊緣線檢測方法
格式:pdf
大小:1005KB
頁數(shù):4P
在基于計算機(jī)視覺的無人機(jī)著陸系統(tǒng)中,利用地平線和跑道邊緣線方程解算著陸參數(shù)是一種可行的方法。利用計算機(jī)視覺和圖像處理技術(shù)研究了一種地平線和跑道邊緣線提取方法,利用canny算子對原始圖像進(jìn)行預(yù)處理,獲取圖像的邊緣信息。提出了一種新的直線檢測方法,并利用檢測出的直線和圖像像素坐標(biāo)系橫坐標(biāo)的夾角確定地平線和跑道左、右邊緣線。實(shí)驗(yàn)研究表明:該方法可以在不同的高度、不同亮度圖像中有效地檢測出地平線和跑道邊緣線。
一種基于OpenCV的飛機(jī)跑道及地平線檢測算法 一種基于OpenCV的飛機(jī)跑道及地平線檢測算法
格式:pdf
大小:364KB
頁數(shù):2P
討論了intel開源計算機(jī)視覺庫(opencomputervision,opencv)在圖像處理中的應(yīng)用。跑道識別是無人機(jī)著陸圖像導(dǎo)航中的一項(xiàng)關(guān)鍵技術(shù),準(zhǔn)確而實(shí)時地檢測出飛機(jī)跑道及地平線對推動無人機(jī)著陸導(dǎo)航技術(shù)的發(fā)展及減少著陸過程中的事故起著至關(guān)重要的作用。采用的方法是對無人機(jī)航拍采集到的rgb數(shù)字原圖進(jìn)行預(yù)處理之后,在opencv平臺上進(jìn)行hough變換,從而提取其飛機(jī)跑道邊緣及地平線,并最終成功的在opencv上實(shí)現(xiàn)了飛機(jī)跑道及地平線識別的仿真。實(shí)驗(yàn)證實(shí)了該檢測算法在無人機(jī)著陸導(dǎo)航技術(shù)中的可行性。
編輯推薦下載
多旋翼無人機(jī)線路巡視模式 多旋翼無人機(jī)線路巡視模式
格式:pdf
大小:197KB
頁數(shù):未知
4.5
電網(wǎng)規(guī)模的日益擴(kuò)大,使得巡線工作量快速增加。無人機(jī)應(yīng)用于輸電線路巡視,可極大地提高巡線的效率。本文集中闡述了無人機(jī)巡視線路的作業(yè)方法、流程及作業(yè)過程中遇到外界干擾的處理方式,如無人機(jī)受強(qiáng)電場電磁干擾的處理方式和無人機(jī)起、降、飛行過程中出現(xiàn)異常的解決辦法等。堅持"安全高效、簡潔實(shí)用"的宗旨,以"方法管理、過程把控"為手段,開展百色局多旋翼無人機(jī)線路巡視模式的深層次研究探討,為"機(jī)器解放人"的無人機(jī)更好地服務(wù)于線路維護(hù)提出合理化建議。
基于多元線性回歸的濕/污染跑道著陸距離估算 基于多元線性回歸的濕/污染跑道著陸距離估算
格式:pdf
大小:199KB
頁數(shù):未知
4.5
在實(shí)際運(yùn)營中,估算飛機(jī)在濕跑道、污染跑道上的著陸距離對飛機(jī)的安全著陸有著重要的意義。對運(yùn)用多元線性回歸模型估算飛機(jī)的著陸距離進(jìn)行了研究,首先采用最小二乘法對多元線性回歸方程求解,然后利用"f檢驗(yàn)"、"t檢驗(yàn)"、"r檢驗(yàn)"對回歸方程進(jìn)行檢驗(yàn),最后給出估算濕跑道、污染跑道著陸距離的擬合公式,仿真結(jié)果表明該方法有效可行。
地平線與跑道邊緣線估計無人機(jī)著陸參數(shù)熱門文檔
信息安全:地平線升起的太陽! 信息安全:地平線升起的太陽!
格式:pdf
大小:53KB
頁數(shù):1P
4.6
信息技術(shù)的發(fā)展和信息化建設(shè)的高速推進(jìn),為信息安全產(chǎn)業(yè)的發(fā)展帶來了前所未有的機(jī)遇。在整個it行業(yè)進(jìn)入平穩(wěn)增長的今天,中國信息安全市場卻正處于快速發(fā)展的階段。政府、電信、金融等部門和行業(yè)對信息安全的投入加大成為推動市場的主要動力,而制造、能源等行業(yè)的安全投入增長迅速,為安全市場打開了更為廣闊的空間。
匍匐在教育地平線上開啟理性之窗 匍匐在教育地平線上開啟理性之窗
格式:pdf
大小:254KB
頁數(shù):2P
4.5
在全面貫徹黨的十六屆五中全會精神,落實(shí)科學(xué)發(fā)展觀,構(gòu)建社會主義和諧社會和深入推進(jìn)素質(zhì)教育的背景下,《教育科學(xué)論壇》應(yīng)承載什么樣的責(zé)任使命,發(fā)展走向如何?我以為,以下幾個方面需要引起關(guān)注和重視。一是生命力。生命力是《論壇》應(yīng)首先關(guān)注的問題。“文以載道。”學(xué)術(shù)性是辦刊的基本要求,但學(xué)術(shù)研究并不意味著遠(yuǎn)離實(shí)際。恰恰相
塬上,地平線下的村落
格式:pdf
大小:6KB
頁數(shù):3P
4.8
——文章來源網(wǎng)絡(luò)整理,僅供參考~1~ 塬上,地平線下的村落 上山不見山,入村不見村, 平地起炊煙,忽聞雞犬聲。 在河南省三門峽市陜縣張汴鄉(xiāng)、山西省運(yùn)城市平陸縣常樂鎮(zhèn)圪塔 村,有相當(dāng)數(shù)量的“地坑院”和“靠崖院”, “藏”在溝壑縱橫的黃土塬上。 20世紀(jì)前期,德國人魯?shù)婪蛩够凇稕]有建筑師的建筑》一書 中,稱地坑院是“大膽的創(chuàng)作、洗練的手法、抽象的語言、嚴(yán) 密的造型”。 南方多巢居,因?yàn)榈孛娉睗瘢槐狈蕉嘌ň樱驗(yàn)槿狈δ静氖希?而窯洞的溫濕度也相宜。傳說平陸地區(qū)常年多有大風(fēng),所謂“ 條山一場風(fēng),年頭到年終;一天進(jìn)嘴四兩土,白天不夠夜里補(bǔ)”。 “地坑院”平地挖坑,“靠崖院”依崖
無人機(jī)航拍攝影
格式:pdf
大小:246KB
頁數(shù):24P
4.5
無人機(jī)航攝安全作業(yè) 1 無人機(jī)航拍攝影 無人機(jī)航攝安全作業(yè) 2 簡述 無人機(jī)航拍攝影是以無人駕駛飛機(jī)作為空中平臺,以機(jī)載遙感設(shè)備,如高分辨率ccd數(shù) 碼相機(jī)、輕型光學(xué)相機(jī)、紅外掃描儀,激光掃描儀、磁測儀等獲取信息,用計算機(jī)對圖像信 息進(jìn)行處理,并按照一定精度要求制作成圖像。全系統(tǒng)在設(shè)計和最優(yōu)化組合方面具有突出的 特點(diǎn),是集成了高空拍攝、遙控、遙測技術(shù)、視頻影像微波傳輸和計算機(jī)影像信息處理的新 型應(yīng)用技術(shù)。 使用無人機(jī)進(jìn)行小區(qū)域遙感航拍技術(shù),在實(shí)踐中取得了明顯成效和經(jīng)驗(yàn)。以無人機(jī)為空 中遙感平臺的微型航空遙感技術(shù),適應(yīng)國家經(jīng)濟(jì)和文化建設(shè)發(fā)展的需要,為中小城市特別是 城、鎮(zhèn)、縣、鄉(xiāng)等地區(qū)經(jīng)濟(jì)和文化建設(shè)提供了有效的遙感技術(shù)服務(wù)手段。遙感航拍技術(shù)對我 國經(jīng)濟(jì)的發(fā)展具有重要的促進(jìn)作用。 一、行業(yè)背景 隨著中國改革開放的逐步深入,經(jīng)濟(jì)建設(shè)迅猛發(fā)展,各地區(qū)的地貌發(fā)生巨
無人機(jī)航拍論文
格式:pdf
大小:7KB
頁數(shù):1P
4.6
無人機(jī)航拍的應(yīng)用我 也希望能為觀眾呈現(xiàn)不一樣的作品來滿足他們的視覺感受之時, 無人機(jī)航拍開始逐漸走入他們的視野,并為他們完成一次又一次的完 美拍攝。本文基于作者多年來對無人機(jī)航拍的實(shí)踐經(jīng)驗(yàn),作出個人對 無人機(jī)航拍的認(rèn)識,供廣大航拍愛好者啟發(fā)和借鑒。 【關(guān)鍵詞】無人機(jī)航拍應(yīng)用 航拍又稱空中攝影或航空攝影,是指從空中對地球地貌、城市景 觀、工程建設(shè)等方面進(jìn)行攝影攝像活動。航拍圖能夠清晰地表現(xiàn)地理 形態(tài),因此除了作為藝術(shù)攝影外,也被運(yùn)用于軍事、交通建設(shè)、水利 工程、生態(tài)研究以及電視欄目等方面,其獨(dú)特的魅力在于一種大氣的 描述,一種氣吞山河的豪情。地面的城市風(fēng)光、建筑物、機(jī)場跑道、 整齊的農(nóng)田??無論是藍(lán)天碧水還是紅花綠樹,通過航拍影視語言的 表現(xiàn),這一切都猶如一曲曲輝煌、立體的交響樂呈現(xiàn)在您面前。 一、無人機(jī)的發(fā)展歷程 無人機(jī)經(jīng)過幾十年的發(fā)展歷程,從技術(shù)角度看已經(jīng)比較成熟。其 成
地平線與跑道邊緣線估計無人機(jī)著陸參數(shù)精華文檔
關(guān)于無人機(jī)的論文綜合
格式:pdf
大小:19KB
頁數(shù):11P
4.7
前言: 無人機(jī)(縮寫為uav)又稱“空中機(jī)器人”是一種動力驅(qū)動、機(jī)上無人駕駛、可 重復(fù)使用的航空器。它大體上是由無人機(jī)載體、地面站設(shè)備(無線電控制、任務(wù) 控制、發(fā)射回收等起降裝置)以及有效負(fù)荷三部分組成的。根據(jù)無人機(jī)的結(jié)構(gòu)、 飛行時間、飛行距離或執(zhí)行任務(wù)的性質(zhì)等特點(diǎn)我們可以把它劃分成不同種類。從 總體結(jié)構(gòu)來看,無人機(jī)有固定翼、垂直旋翼、傾斜旋翼、旋翼/固定翼之分;根據(jù)活 動半徑和續(xù)航時間,無人機(jī)可大體分為近程、短程、中程和遠(yuǎn)程四類;根據(jù)用途, 我們又可以把無人機(jī)分為軍用和民用兩大類。無人機(jī)是1917年由英國首先研制 成功的。雖然它問世已久,但直到上世紀(jì)50年代才得到了真正的發(fā)展。 國內(nèi)外無人機(jī)發(fā)展現(xiàn)狀: 國內(nèi)無人機(jī)近幾年來發(fā)展比較快,民企也多通過第三屆尖兵之翼就可以看 出國內(nèi)現(xiàn)在發(fā)展無人機(jī)的趨勢越來越好。而除軍事用途外,由于無人機(jī)成本相 對較低、

無人機(jī)航拍方案無人機(jī)航拍服務(wù)實(shí)施方案
格式:pdf
大小:16.7MB
頁數(shù):28P
4.8
無人機(jī)航拍方案無人機(jī)航拍服務(wù)實(shí)施方案
無人機(jī)在電力線路巡檢中的應(yīng)用及前景 無人機(jī)在電力線路巡檢中的應(yīng)用及前景
格式:pdf
大小:59KB
頁數(shù):未知
4.3
本文就目前我國無人機(jī)在電力巡檢領(lǐng)域中的應(yīng)用及前景進(jìn)行了簡要闡述,引出了無人機(jī)電力巡檢的發(fā)展、優(yōu)勢、技術(shù)、規(guī)模、前景,探討了我國無人機(jī)在電力巡檢領(lǐng)域中的應(yīng)用及前景.
基于無人機(jī)圖像的配網(wǎng)線斷股缺陷實(shí)時檢測 基于無人機(jī)圖像的配網(wǎng)線斷股缺陷實(shí)時檢測
格式:pdf
大小:158KB
頁數(shù):2P
4.5
為了提高無人機(jī)圖像配網(wǎng)線的安全性,以及保證配網(wǎng)線始終傳輸穩(wěn)定可持續(xù)的電流,需要對配電網(wǎng)線進(jìn)行實(shí)時檢測,全面掌握配網(wǎng)線有無斷股缺陷,或是短路的問題,及時發(fā)現(xiàn)配電網(wǎng)線存在的異常情況,可以運(yùn)用后臺圖形處理系統(tǒng)以及無限通信模塊,檢測各處配網(wǎng)線,快速檢測出有無缺陷,采用相應(yīng)的措施加以解決,杜絕因缺陷和故障問題引發(fā)線路短路的現(xiàn)象,提高配網(wǎng)線運(yùn)行的安全性和效率。

無人機(jī)電力巡線系統(tǒng)方案-保利
格式:pdf
大小:1.4MB
頁數(shù):25P
4.4
無人機(jī)輸電巡線系統(tǒng)實(shí)施方案 保利國防中心 二零一一年十一月 電力巡線第1頁共25頁 1、概述 隨著輸電高壓等級的不斷提高,輸電線路的巡線作業(yè)對維護(hù)區(qū)域油網(wǎng)的安 全、穩(wěn)定、高效運(yùn)行越來越重要,也是油網(wǎng)運(yùn)行的當(dāng)務(wù)之急。輸電線路跨區(qū)域分 布,點(diǎn)多面廣,所處地形復(fù)雜,自然環(huán)境惡劣,輸電線路設(shè)備長期暴露在野外, 受到持續(xù)的機(jī)械張力、雷擊閃絡(luò)、材料老化、覆冰以及人為因素的影響而產(chǎn)生倒 塔、斷股、磨損、腐蝕、舞動等現(xiàn)象,這些情況必須及時得到修復(fù)或更換。絕緣 子還存在被雷擊損傷、樹木生長引起高壓放油以及絕緣劣化而導(dǎo)致輸電線路事 故,桿塔存在被偷盜等意外事件,必須及時處理。傳統(tǒng)的人工巡線方法不僅工作 量大而且條件艱苦,特別是對山區(qū)和跨越大江大河的輸電線路的巡查,以及在冰 災(zāi)、水災(zāi)、地震、滑坡、夜晚期間巡線檢查,所花時間長、人力成本高、困難大, 某些線路區(qū)域和某些巡檢項(xiàng)目人工巡查方法
地平線與跑道邊緣線估計無人機(jī)著陸參數(shù)最新文檔

無人機(jī)電力巡線系統(tǒng)方案
格式:pdf
大小:3.5MB
頁數(shù):21P
4.8
無人機(jī)輸電巡線系統(tǒng)實(shí)施方案 深圳市大疆聯(lián)創(chuàng)科技有限公司 二零一六年三月 深圳市大疆聯(lián)創(chuàng)科技有限公司第1頁共21頁 1、概述 隨著輸電高壓等級的不斷提高,輸電線路的巡線作業(yè)對維護(hù)區(qū)域油網(wǎng)的安 全、穩(wěn)定、高效運(yùn)行越來越重要,也是油網(wǎng)運(yùn)行的當(dāng)務(wù)之急。輸電線路跨區(qū)域分 布,點(diǎn)多面廣,所處地形復(fù)雜,自然環(huán)境惡劣,輸電線路設(shè)備長期暴露在野外, 受到持續(xù)的機(jī)械張力、雷擊閃絡(luò)、材料老化、覆冰以及人為因素的影響而產(chǎn)生倒 塔、斷股、磨損、腐蝕、舞動等現(xiàn)象,這些情況必須及時得到修復(fù)或更換。絕緣 子還存在被雷擊損傷、樹木生長引起高壓放油以及絕緣劣化而導(dǎo)致輸電線路事 故,桿塔存在被偷盜等意外事件,必須及時處理。傳統(tǒng)的人工巡線方法不僅工作 量大而且條件艱苦,特別是對山區(qū)和跨越大江大河的輸電線路的巡查,以及在冰 災(zāi)、水災(zāi)、地震、滑坡、夜晚期間巡線檢查,所花時間長、人力成本高、困難大, 某些線路區(qū)域
無人機(jī)在輸電線路架設(shè)中的應(yīng)用 無人機(jī)在輸電線路架設(shè)中的應(yīng)用
格式:pdf
大小:160KB
頁數(shù):未知
4.6
以阿壩鎮(zhèn)江關(guān)220kv變電站110kv配套工程為例,介紹輸電線路放線施工中使用的新式展放方法、采用的新設(shè)備、新技術(shù)和新工藝。無人機(jī)放線為電網(wǎng)建設(shè)注入了新的活力,挑戰(zhàn)了傳統(tǒng)的施工方法,已經(jīng)得到推廣和應(yīng)用。
基于無人機(jī)放線的輸電線路架線施工管理 基于無人機(jī)放線的輸電線路架線施工管理
格式:pdf
大小:781KB
頁數(shù):2P
4.4
隨著科學(xué)技術(shù)的不斷發(fā)展,我國電力行業(yè)具有新的發(fā)展與突破,為提升輸電線施工管理質(zhì)量,順應(yīng)時代發(fā)展的\"新常態(tài)\
無人機(jī)電機(jī)測試平臺設(shè)計 無人機(jī)電機(jī)測試平臺設(shè)計
格式:pdf
大小:1.9MB
頁數(shù):5P
4.6
在無人機(jī)實(shí)際開發(fā)過程中,該文就如何對電機(jī)的功能測試以及性能測試描述了一種解決方案,并且詳細(xì)地介紹了各個模塊的功能和模塊之間的協(xié)作過程[1].另外,針對測試過程中的特殊需求提出了相應(yīng)的測試方案.隨后,該文還設(shè)計了配套的上位機(jī),能夠?qū)崟r地以圖形化的形式顯示測試數(shù)據(jù)的變化,最后在實(shí)際應(yīng)用中將各個模塊組合,形成了最終的無人機(jī)電機(jī)測試平臺[2].
220千伏線路無人機(jī)放線施工方案
格式:pdf
大小:266KB
頁數(shù):13P
4.6
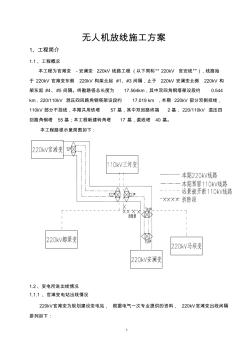
1 無人機(jī)放線施工方案 1、工程簡介 1.1、工程概況 本工程為官灘變-安瀾變220kv線路工程(以下簡稱“220kv官安線”),線路始 于220kv官灘變東側(cè)220kv構(gòu)架北起#1、#3間隔,止于220kv安瀾變北側(cè)220kv構(gòu) 架東起#4、#5間隔。終勘路徑總長度為17.564km,其中雙回角鋼塔架設(shè)段約0.544 km,220/110kv混壓四回路角鋼塔架設(shè)段約17.019km,本期220kv部分雙側(cè)掛線, 110kv部分不掛線,本期共用鐵塔57基,其中雙回路終端2基,220/110kv混壓四 回路角鋼塔55基;本工程新建轉(zhuǎn)角塔17基,直線塔40基。 本工程路徑示意簡圖如下: 1.2、變電所進(jìn)出線情況 1.1.1、官灘變電站出線情況 220kv官灘變?yōu)橐?guī)劃建設(shè)變電站,根據(jù)電氣一次專業(yè)提供的資料,22
集電線路無人機(jī)牽引導(dǎo)線跨越施工技術(shù) 集電線路無人機(jī)牽引導(dǎo)線跨越施工技術(shù)
格式:pdf
大小:397KB
頁數(shù):2P
4.5
集電線路在山地風(fēng)場上導(dǎo)線展放都會面臨著被跨越處征地困難、山體陡峭較難施工的問題,會破壞原有地貌其影響程度、征地費(fèi)用,以及人工機(jī)械費(fèi)用難以評估和確定。無人機(jī)牽引導(dǎo)線跨越不僅作為征地困難情況下的一種使用途徑,同時可用于跨越山體山谷、河流等,極大地提高了導(dǎo)線展放的安全性。隨著勞動力成本的提高,環(huán)境保護(hù)意識的增強(qiáng),無人機(jī)牽導(dǎo)線跨越的施工工藝會逐步顯現(xiàn)出優(yōu)勢目前,集電線路張力架線,通常采用的施工工藝,根據(jù)現(xiàn)場情況及導(dǎo)引繩的長度,采取的是以小帶大方式,首先用無人機(jī)
基于低空無人機(jī)的電力線路控制測量與路徑優(yōu)化研究 基于低空無人機(jī)的電力線路控制測量與路徑優(yōu)化研究
格式:pdf
大小:1.7MB
頁數(shù):2P
4.7
基于低空無人機(jī)技術(shù)和全數(shù)字航測路徑優(yōu)化技術(shù),對山區(qū)電力線路工程進(jìn)行航空攝影和路徑優(yōu)化,研究利用無人機(jī)航攝技術(shù),解決零散分布、小區(qū)域、帶狀測區(qū)的航空影像獲取需求,研究全數(shù)字航測路徑優(yōu)化技術(shù),應(yīng)用于電力線路工程,提高線路勘測設(shè)計工作效率,提升勘測設(shè)計水平,降低勞動強(qiáng)度,解決電力線路工程建設(shè)精細(xì)化、智能化的需求。
無人機(jī)地面站人機(jī)工效綜合評價研究 無人機(jī)地面站人機(jī)工效綜合評價研究
格式:pdf
大小:512KB
頁數(shù):未知
4.5
無人機(jī)地面站發(fā)展日趨綜合復(fù)雜,為了減輕地面站操作員工作負(fù)荷,避免飛行事故發(fā)生,保證高效、安全地完成飛行任務(wù),開展無人機(jī)地面站人機(jī)工效評價方法研究十分重要。分析無人機(jī)地面站人機(jī)工效評價特點(diǎn);借鑒有人駕駛飛機(jī)人機(jī)工效評價方法,利用德爾菲法,明確無人機(jī)地面站人機(jī)工效綜合評價的評價指標(biāo),提出地面站人機(jī)工效評價專家調(diào)查表的構(gòu)架及其內(nèi)容;并探索無人機(jī)地面站人機(jī)工效評價方法。實(shí)例研究表明:本文提出的評價指標(biāo)和方法可以滿足無人機(jī)地面站人機(jī)工效評價需求,可為無人機(jī)地面站人機(jī)工效評價提供一定借鑒。
無人機(jī)傾斜攝影在工程征地移民實(shí)物調(diào)查中的應(yīng)用初探
格式:pdf
大小:77KB
頁數(shù):2P
4.5
隨著無人機(jī)傾斜攝影技術(shù)的快速發(fā)展,它在各行各業(yè)的應(yīng)用越來越廣泛,其中在工程及測量領(lǐng)域的功能發(fā)揮也不斷得到開發(fā)。文章從無人傾斜攝影技術(shù)的特點(diǎn)、工作原理等方面進(jìn)行闡述,初步探討其在工程征地移民實(shí)物調(diào)查中的應(yīng)用。并針對目前無人機(jī)傾斜攝影技術(shù)水平的限制因素,提出其在征地移民實(shí)物調(diào)查應(yīng)用中的質(zhì)量控制方案。通過與傳統(tǒng)實(shí)物調(diào)查方法對比,體現(xiàn)無人機(jī)傾斜攝影在工程征地移民實(shí)物調(diào)查應(yīng)用中的實(shí)用性及優(yōu)越性。
(完整word版)無人機(jī)使用操作步驟
格式:pdf
大小:16KB
頁數(shù):2P
4.7
航拍飛機(jī)基本操作步驟 1.本操作步驟,隨飛行器箱子攜帶或自行打印。每次飛行均按此步 驟操作。 2.將箱子放在平整地面,將拉鏈拉至轉(zhuǎn)角后末端。(這步很重要, 若未拉至轉(zhuǎn)角后末端,易損壞拉鏈造成箱子損壞。) 3.打開箱子,取出飛行器放置在平整的地面上。 4.將動力電池安裝上機(jī)體上。電池按鈕短按一次長按一次2秒開啟飛 機(jī)電源。 5.遙控器短按一次再長按一次2秒開啟遙控器電源 6.待遙控器綠燈亮,快速撥動變形開關(guān)4次,將飛機(jī)運(yùn)輸模式轉(zhuǎn)換為 降落模式。轉(zhuǎn)換成功后,飛機(jī)電池按鈕短按一次長按一次2秒關(guān)閉 飛機(jī)電源(這個步驟很重要,切勿在通電的情況下安裝云臺相機(jī)) 7.將云臺相機(jī)安裝上飛機(jī),并鎖定。(白線對齊后根據(jù)提示方向鎖 定) 8.將螺旋槳葉片區(qū)分有白點(diǎn)和無白點(diǎn)對應(yīng)安裝上飛行器。 9.將下載好djigoapp的安卓或者平板設(shè)備用usb線連接至遙控器, 并將設(shè)備固
地平線與跑道邊緣線估計無人機(jī)著陸參數(shù)相關(guān)
文輯推薦
知識推薦
百科推薦


職位:給排水專業(yè)監(jiān)理工程師
擅長專業(yè):土建 安裝 裝飾 市政 園林


