




(2)智能化球機安裝做法
格式:pdf
大小:268KB
頁數:3P
智能化球機安裝做法 1、材料;一體化攝像機一套、固定配件 2、工具:手電鉆,板手、壓線鉗、套裝工具一套、尺子。 3、工序;現場定位—支架安裝—引線—底座安裝---連線---設備安 裝及接線—調正。 4、工藝方法; 1、現場測量定位。 2、確定好支架安裝位置,安裝時支架與墻面固定應豎直平穩,其 表面保持水平。 3、將支架安裝好時應將預先鋪設好的線纜從支架中穿出。 4、在安裝球機前,應先將旋轉機芯拆下來,以便來進行接線等工 作。通過逆時針旋轉機芯,可將機芯旋下,將機芯與球體外殼分離, 球體外殼安裝應嚴格按照廠家要求進行固定連接,并扣好保護金屬扣 件和接地連接線。 5、一體化高速攝像機的供電電源為ac24v,1.5a,采用rvv3*2.5, 電源線從設備機房引ac220v電源至現場設備的電源適配器,經變壓 成ac24v接至攝像機連接器的電源連接端子。 攝像機
E系列網絡高清球機安裝手冊
格式:pdf
大小:1.2MB
頁數:49P
系列網絡高清智能球安裝手冊 0 e系列網絡高清智能球 安裝手冊 ud.6l0101a0730a02 e系列網絡高清智能球安裝手冊 1 非常感謝您購買我司產品,如您有任何疑問或需求請隨時聯系我們。 本手冊適用于e系列網絡高清智能球。 申明 本手冊可能包含技術上不準確的地方、或與產品功能及操作不相符的地方、或印 刷錯誤。我司將根據產品功能的增強或變化而更新本手冊的內容,并將定期改進 及更新本手冊中描述的軟硬件產品。更新的內容將會在本手冊的新版本中加入, 恕不另行通知。 本手冊中內容僅為用戶提供參考指導作用,不保證與實物完全一致,請以實物為 準。 本手冊中提到的部件、組件和附件僅作說明之用,不代表購買機型的配置,詳細 配置請以裝箱清單為準。 0501011030508 e系列網絡高清智能球安裝手冊 2 前言 本節內容的目的是確保用戶通過本手冊能夠正確使用產品,以避免操作中的
編輯推薦下載
球機的安裝
格式:pdf
大小:8KB
頁數:3P
 4.4
4.4
球機的安裝 安裝球機前應嚴格按照電氣規范進行管線敷設,將強電與弱電信號線隔離穿敷,避免干 擾。在室外空曠環境,應采取獨立的外部防雷措施。球機本身也應保持良好的接地,防止靜 電累積等對球機產生影響。 安裝時要正確接好電源線、通信線和視頻線,連接時要仔細參照安裝說明的要求,以確 認通信方式和相應的引腳定義。一般地,設備應在施工后期安裝,以避免施工現場的大量粉 塵侵入球機,直接影響其使用效果和壽命。 此外,以下注意事項應予以額外重視: 注意事項一:供電 為保證球機正常工作,供電電源不宜低于球機輸入電壓的標稱值。當標稱值為24vac, 電壓波動不宜超出±25%。球機常見工作電壓為24vac。目前市場上存有220vac型號球機, 其實質將變壓器內置于球罩,變壓后給球機供電。布線時應強調強、弱電分開,以避免強電 對弱電的干擾。球機內部空間有限,內置變壓器使強弱電共處,從而
球機安裝熱門文檔
監控球機開發指導
格式:pdf
大小:475KB
頁數:31P
4.3
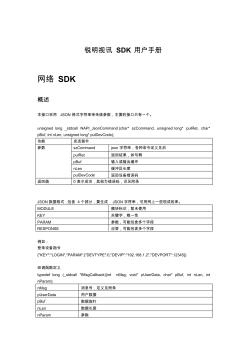
銳明視訊sdk用戶手冊 網絡sdk 概述 本接口采用json格式字符串來傳遞參數,主要的接口只有一個。 unsignedlong_stdcallnapi_jsoncommand(char*szcommand,unsignedlong*pulret,char* pbuf,intnlen,unsignedlong*puldevcode); 功能發送指令 參數szcommandjson字符串,各種命令定義見后 pulret返回結果,如句柄 pbuf輸入或輸出緩沖 nlen緩沖區長度 puldevcode返回設備錯誤碼 返回值0表示成功,其他為錯誤碼,詳見附錄 json數據格式,包含4個部分,要生成json字符串,可用網上一些現成的庫。 module模塊標識,暫未使用 key關鍵字,唯一性 param參數,可能包含多個字段
監控系統球機調試
格式:pdf
大小:17KB
頁數:1P
4.7
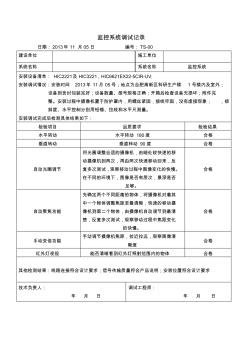
監控系統調試記錄 日期:2013年11月05日編號:ts-00 建設單位施工單位 系統名稱系統名稱監控系統 安裝設備清單:hic2221及hic3221,hic6621ex22-5cir-uv; 安裝調試情況:安裝時間2013年11月05號;地點為合肥高新區科研生產樓1號樓內及室外; 設備到貨時包裝完好;設備數量、型號規格正確;開箱后檢查設備無損壞;附件完 整。安裝過程中攝像機置于防護罩內,用螺絲緊固,接線牢固,沒有虛接現象;,傾 斜度、水平控制分別用鉛錘、拉線和水平尺測量。 安裝調試完成后檢測具體結果如下: 檢驗項目品質要求檢驗結果 水平轉動水平轉動180度合格 垂直轉動垂直轉動90度合格 自動光圈調節 將光圈調整合適的攝像機,由暗處較快速的移 動攝像機到兩次,再由兩次快速移動回來,反 復多次測試,觀察移動過程中圖像變化的快慢。 在不同的
 中型足球機器人電磁鐵式踢球機構的建模與控制
中型足球機器人電磁鐵式踢球機構的建模與控制 中型足球機器人電磁鐵式踢球機構的建模與控制
格式:pdf
大小:607KB
頁數:4P
4.6
運用機理建模的方法,簡化電容和電磁鐵的工作模式,建立電磁鐵式踢球機構的物理與數學模型。實驗表明:該模型能夠精準反映機構性能,且控制簡單。
智能違章球機工程安裝指導書V2.0_修正版_修正版
格式:pdf
大小:6.2MB
頁數:19P
4.7
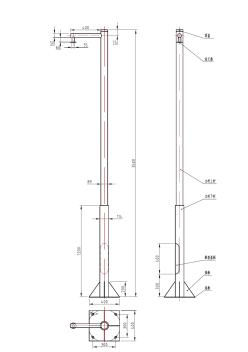
修正版 違章球機工程安裝指導書 浙江宇視科技有限公司 修正版 修訂記錄 日期修訂版本描述作者 2015/1/301.00初稿g01887 2015/2/71.1根據評審結論修改g01877 2015/3/41.2根據評審會議結論修改g01887 2016/1/62.0根據評審會議結論修改x02366 修正版 目錄 1違章球機工勘原則·····································································4 1.1違章球機功能簡介·········································································································4 1.2違章球機安裝位置要素···
球機安裝精華文檔
鋼球磨球機砂輪修整技術改進及應用 鋼球磨球機砂輪修整技術改進及應用
格式:pdf
大小:365KB
頁數:3P
4.7
以m8891及3m4630磨球機為例,介紹了砂輪修整方法改進后的修整原理、結構設計及修整參數的選擇,并對改造后效果進行了實際應用考核,結果表明:新修整裝置可提高加工質量和生產效率,降低生產成本
太陽能無線監控4G球機
格式:pdf
大小:2.6MB
頁數:16P
4.7
太陽能無線監控系統解決方案 太陽能無線監控系統 解決方案 南京泰華智能科技有限公司 2019/11/5 太陽能無線監控系統解決方案 目錄 1.系統簡介...................................................................................................3 2.系統原理和架構.....................................................................................5 2.1太陽能供電子系統.................................................................................6 2.2無線視頻傳輸子系統.......
海康威視2.5寸球機無線設置教程
格式:pdf
大小:1.1MB
頁數:17P
4.4
無線mini球機聯網 快速指南 無線mini球機聯網?快速指南 i 版權所有?杭州海康威視數字技術股份有限公司2015。保留一切權利。 本手冊的任何部分,包括文字、圖片、圖形等均歸屬于杭州海康威視數字技術股份有限公 司或其子公司(以下簡稱“本公司”或“海康威視”)。未經書面許可,任何單位和個人 不得以任何方式摘錄、復制、翻譯、修改本手冊的全部或部分。除非另有約定,本公司不 對本手冊提供任何明示或默示的聲明或保證。 關于本手冊 本手冊描述的產品僅供中國大陸地區銷售和使用。 本手冊作為指導使用。手冊中所提供照片、圖形、圖表和插圖等,僅用于解釋和說明目的, 與具體產品可能存在差異,請以實物為準。因產品版本升級或其他需要,本公司可能對本 手冊進行更新,如您需要最新版手冊,請您登錄公司官網


海康威視球機巡航應用設置方法
格式:doc
大小:1.2MB
頁數:6P
4.4
海康威視球機巡航應用設置方法 如果您現在使用球機還只會上下左右控制,那您真的out了,預置點是什么?巡航怎么設?海康威視一級代理華安瑞成小編來教你玩轉海康威視球機,最通俗易懂的設置方法,巡航就是那么簡單! 現在您的身旁有海康威視錄像機和海康威視球機,跟著小編一起來看看在海康威視錄像機上,預置點和巡航怎么設,如果身邊沒有海康威視錄像機和球機?沒關系,收藏本攻略,去現場再也不怕設置不成功啦! 一、預置點設置 海康威視錄像機上進行操作,選擇"主菜單→通道管理→云臺配置"。進入"云臺配置"界面。 預置點設置三步走 1.使用云臺方向鍵將圖像旋轉到需要設置預置點的位置 2.在"預置點"框中,輸入預置點號 3.單擊"設置",完成預置點的設置 重復以上操作,輸入不同的預置點號,可設置更多預置點。 預置點調用 進入云
球機安裝最新文檔

監控球機故障解決方案大集合
格式:pdf
大小:10KB
頁數:5P
4.7
一、圖像方面 問:從監視器顯示無圖像? 先檢查是否電源線接好,電壓是否正常,指示燈是否發亮,球機是 否能正常自檢,如以上正常,還需檢查視頻線路是否正常,如也正常那可能 是相機機芯有故障。 問:球機通電自檢后圖像變黑,但能控制? 由于控制系統有干擾,改變了攝像機光圈參數,進入攝像機菜單后 將攝像機復位。 問:球機與硬盤錄像機相接,遇到強光畫面就花? 可能與硬盤錄像機的壓縮卡有關系。 問:圖像時有時無? 檢查視頻線接觸是否良好,還有其他連接插座以及攝像機的扁平線 是否折斷。 問:通電后發現雪花點很多,光圈比較小? 1、改變了攝像機參數,進入菜單將攝像機復位。 2、打開攝像機光圈。 問:像機只能在某個焦距能正常工作,其他位置不能正常聚集? 1、轉換一個物體觀看是否還有這種現象,如果還是一樣可能是像機 機芯聚焦控制系統造成的故障。 2、攝像機可能處在手動聚焦狀
網絡紅外球機參數
格式:pdf
大小:234KB
頁數:3P
4.5
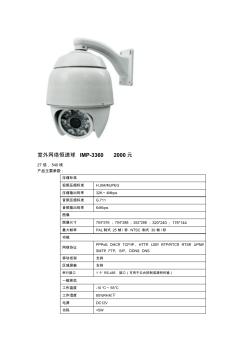
室外網絡恒速球imp-33602000元 27倍,540線 產品主要參數: 壓縮標準 視頻壓縮標準h.264/mjpeg 壓縮輸出碼率32k~4mbps 音頻壓縮標準g.711 音頻輸出碼率64kbps 圖像 圖像尺寸704*576;704*288;352*288;320*240;176*144 最大幀率pal制式25幀/秒ntsc制式30幀/秒 功能 網絡協議 pppoe、dhcp、tcp/ip、http、udp、rtp/rtcp、rtsp、upnp、 smtp、ftp、sip、ddns、dns 移動偵測支持 區域屏蔽支持 串行接口1個rs-485接口(可用于云臺控制或透明傳輸) 一般規范 工作溫度-10℃~65℃ 工作濕度85%rh以下 電源dc12v 功耗<5w 一、功能簡介 網絡功能 支持通過客
小型足球機器人踢球器機電一體化設計 小型足球機器人踢球器機電一體化設計
格式:pdf
大小:136KB
頁數:3P
4.7
裝有踢球器的機器人可以出色地完成機器人足球比賽任務。本文對踢球器的概念設計進行了分析,比較詳細地說明了robocup小型足球機器人的具體設計和工作原理。通過機械部分“智能化”的設計,使得踢球器的控制過程簡單而有效,具有很強的魯棒性,較好地適應了整個機器人的性能要求。
小型足球機器人踢球器機電一體化設計 小型足球機器人踢球器機電一體化設計
格式:pdf
大小:499KB
頁數:3P
4.5
裝有踢球器的機器人可以出色地完成機器人足球比賽任務。對踢球器的概念設計進行了分析,比較詳細地說明了robocup小型足球機器人的具體設計和工作原理。通過機械部分"智能化"的設計,使得踢球器的控制過程簡單而有效,具有很強的魯棒性。較好地適應了整個機器人的性能要求。
 核安全峰會:夯實全球機制
核安全峰會:夯實全球機制 核安全峰會:夯實全球機制
格式:pdf
大小:158KB
頁數:未知
4.7
第三屆核安全峰會已于3月24-25日在海牙舉行。這項國際議程由美國總統奧巴馬發起,從2010年起每兩年舉行一次,首次在華盛頓召開,第二次于2012年在首爾舉行,今年這第三次則由歐洲的荷蘭做東。迄今,會議規模已達53國與四個國際組織。我國國家主席胡錦濤和習近平先后參加了全部三屆核安全峰會,體現了中國對
磨球機砂輪板胎的改進 磨球機砂輪板胎的改進
格式:pdf
大小:144KB
頁數:未知
4.7
采用灌鉛法焊接磨球機砂輪時,雖工藝簡單,但砂輪利用率較低。為提高砂輪利用率,我們對砂輪板胎進行了改進,如右圖所示。改進方法如下:(1)把鑲嵌砂輪的板胎高度由30mm改為20mm。
教學型高仿真乒乓球發球機械手設計 教學型高仿真乒乓球發球機械手設計
格式:pdf
大小:472KB
頁數:未知
4.6
采用氣液聯動、plc控制的方式,高度模擬真人揮動手臂的發球方式,用液壓缸帶動發球機移動變位,用氣壓缸模擬手臂動作,用伺服電機帶動球拍模擬手腕角度發出旋轉球,同時用plc控制各執行機構運動,突破了現有摩擦輪發球和一般直板式發球模式的局限,可實現各種旋球的隨機變向變位發球,具有高度仿真性。
回轉式成球機結構設計的改進 回轉式成球機結構設計的改進
格式:pdf
大小:192KB
頁數:3P
4.7
針對傳統回轉式成球機使用過程中存在的問題,對其結構進行了改進,開發了一種適用性廣、操作簡單、能耗低、粉塵污染小,且筒體傾角、物料停留時間及噴淋角度等可調的回轉式成球機,可滿足不同工藝參數操作要求。目前,該設備已在國內某催化劑生產企業使用,效果良好。
球機安裝相關
文輯推薦
知識推薦
百科推薦


職位:暖通設計助理
擅長專業:土建 安裝 裝飾 市政 園林


