





格式:pdf
大小:802KB
頁數: 5頁
為解決單輸入規則模塊連接區間二型模糊控制器的設計缺少系統化方法的問題,提出了一種利用先驗知識中所包含信息來系統化地構建單輸入規則模塊連接區間二型模糊控制器的方法.考慮了3種類型的關于被控系統的先驗知識:被控系統的反對稱性、單調性以及閉環系統的局部穩定性,并將這些先驗知識轉化成了對單輸入規則模塊連接區間二型模糊控制器參數的約束.將所提方案應用到了倒立擺系統的穩定性控制上.倒立擺系統控制器的設計過程表明:這些先驗知識有助于系統化地設計單輸入規則模塊中的模糊規則,并能減小控制器參數的可行搜索區域.仿真結果驗證了所提方案的有效性以及先驗知識在控制器綜合過程中的有用性.
格式:pdf
大小:591KB
頁數: 8頁
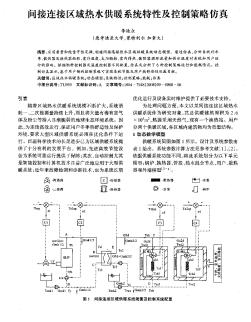
間接連接區域熱水供暖系統特性及控制策略仿真——應用質量和能量守恒定律,創建間接連接熱水區域供暖系統動態模型。通過仿真,分析系統補水率、散熱器及換熱器面積、室外溫度、太陽輻射、室內得熱、散熱器循環流量和供水溫度對系統和用戶運行的影響。根據燃料控...
熱門知識
連接區段-
話題: 工程造價jancerchang
-
話題: 地產家居dianliguan
-
話題: 工程造價chendelong88
精華知識
連接區段-
話題: 工程造價lizhi_xing
-
話題: 工程造價applesky429
-
話題: 工程造價sunyanli520

最新知識
連接區段-
話題: 工程造價ucc7777777

相關問答
連接區段-
話題: 工程造價easycuichen
-
話題: 項目管理wangshuai18
連接區段相關專題
- 可視門鈴的線路怎么連接
- 樓道觸摸式開關如何連接
- 自動平開門消防連接怎么接
- 膠合木梁和木柱如何連接
- 卷簾門卷軸與門片怎么連接
- 油庫鶴管改造后的連接方式
- 與吊裝燈連接的是幾根線
- 管道與閥門的連接問題
- 橡膠密封圈連接怎樣施工
- 橡膠軟連接執行標準有哪些
- 在砌塊配筋砌體中使用的新型鋼筋直螺紋連接套筒
- 在這里卡住 防止螺栓連接松弛的成對的楔形鎖緊盤
- 多功能快速連接法蘭CN209743850U
- 怎樣正確連接三相電動機接線盒內已混亂的六根引出線
- 關于環網柜與10kV電纜連接問題及其解決措施
- 關于16定額溝槽管道連接子目套用和計量技術復核記錄
- 公稱壓力PN表示螺栓連接閥蓋楔式閘閥力矩參考表
- 光纖生物傳感器系統中光纖連接器性能分析與優化設計
- 關于加強預應力混凝土抗拔管樁連接接頭質量控制通知
- 關于發布環壓連接管道工程技術規程公告第96號
- 光纖光纜光纖連接器
- 關于建筑工程中鋼筋連接方法與質量控制問題論文要點
- 固原市清水河城區段河道蓄水工程聯合運行調度方案
- 夯管鋼管接口連接分項工程(驗收批)質量驗收記錄表
- 國標<鋼制管法蘭連接強度計算方法>評析
- 關于樂昌至廣州高速公路樟市至花東段及韶贛北連接線施
- 基于ABAQUS風力機塔筒螺栓連接接觸非線性分析