




格式:pdf
大小:952KB
頁數: 3頁
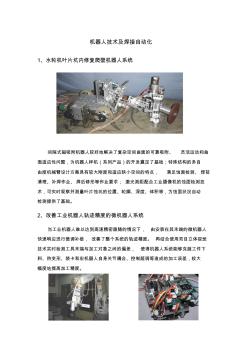
機器人技術及焊接自動化 1、水輪機葉片坑內修復爬壁機器人系統 間隙式磁吸附機器人較好地解決了復雜空間曲面的可靠吸附、 靈活運動和曲 面適應性問題,為機器人樣機(系列產品)的開發奠定了基礎;特殊結構的多自 由度機械臂設計方案具有較大剛度和適應狹小空間的特點, 滿足蝕面檢測、焊前 清理、補焊作業、焊后修形等作業要求; 激光測距配合工業攝像機的蝕面檢測技 術,可實時觀察并測量葉片蝕坑的位置、輪廓、深度、體積等,為蝕面狀況自動 檢測提供了基礎。 2、改善工業機器人軌跡精度的微機器人系統 當工業機器人難以達到高速精密跟隨的情況下, 由安裝在其末端的微機器人 快速響應進行微調補償, 改善了整個系統的軌跡精度。 再結合使用雙目立體視覺 技術實時檢測工具末端與加工對象之間的偏差, 使得機器人系統能夠克服工件下 料、熱變形、裝卡和宏機器人自身關節耦合、控制超調等造成的加工誤差,較大 幅度地提高加工精度。 3

格式:pdf
大小:53KB
頁數: 8頁
1 鏈 條 鏈 接 塊 焊 接 機 器 人 工 作 站 方 案 設 計 書 二 0一二年二月十日 2 鏈條鏈接塊焊接機器人工作站方案設計書 焊接對象:鏈接外塊 需方公司: 單 位 聯系人 電 話 地 址 郵 箱 傳 真 供方公司: 單 位 聯系人 傳 真 地 址 網 站 電 話 郵 箱 簽發記錄: 校 核 年 月 日 審 核 年 月 日 批準簽發 年 月 日 3 目 錄 一 焊接工件規格 ?????????????????????? 4 二 焊接工藝及焊接程序 ??????????????????? 4 三 機器人焊接單元機的特點及配置 ?????????????? 5 1 、機器人系統 ???????????????????? 5 2 、 焊接設備系統 ??????????????????? 6 3 、
熱門知識
機器人焊接設備精華知識
機器人焊接設備-
話題: 室內設計Riversky2000
-
話題: 室內設計loveforevera
最新知識
機器人焊接設備-
話題: 裝修工程wangyang9299
-
話題: 裝修工程linqingqing
-
話題: 工程造價151****3122
相關問答
機器人焊接設備機器人焊接設備相關專題
- 制作石灰膏有什么機器
- 做鍋把手用的膠木粉機器
- 用什么機器破水泥路好
- 加工封口膠要用哪幾臺機器
- 粉碎石灰巖都用哪些機器
- 生產石膏線機器設備有哪些
- 生產膠布的機器叫什么
- 石材加工機器哪家好
- 石膏線條機器哪有賣的
- 石灰石生產線需要什么機器
- 能跨越水平窗框障礙的玻璃幕墻清洗機器人的設計
- 關于白車身裝焊夾具設計及點焊機器人焊接仿真分析
- 串聯機器人結構設計及有限元分析優化
- 基于NSGA-II算法管道清灰機器人變徑機構優化
- 基于運動控制卡2PPa移動并聯機器人控制系統
- 基于面向工業機器人控制器軟PLC系統軟件開發分析
- 機器人的機電一體化技術專業實訓教學模式設計與研究
- 東北大學機器人科學與工程學院博士擬錄取名單
- Modbus TCP協議水下機器人照明燈電壓調節
- MSP430F169的電纜管道牽引機器人系統設計
- 發那科PVC機器人操作說明
- ADAMS的太陽能道路欄桿清洗機器人虛擬樣機設計
- 機器人涂膠系統供膠、加熱電控柜說明書設計論文說明書
- 機器人機電一體化設計方法與應用研究振動試驗模態分析
- RS485總線的遙控機器人通訊系統設計和實現
- MATLAB的仿壁虎機器人天花板粘附運動仿真
- PLC的發熱電纜線芯自動焊接設備控制系統設計