

基于遺傳算法的輪式管道機器人的參數優化
格式:pdf
大小:1.4MB
頁數:4P
人氣 :97
 4.8
4.8
研究了一種輪式全驅動管道機器人質量的優化問題,提出一種基于遺傳算法的質量選擇的優化模型,分析了輪式管道機器人在滿足拖動能力、行進速度等性能指標的要求下,通過輪徑、輪距、轉矩、轉速等參數的改變,能夠使機器人的質量得到一個較小、較優的數值,實現機器人的整機輕巧,使用方便,降低制造成本。采用遺傳算法,通過C++編制仿真程序,仿真結果證明了該算法是有效的、穩定的。通過機械系統動力學仿真分析軟件ADAMS進行拖動力仿真試驗,證明了該優化方法的正確性。



螺旋輪式管道機器人設計及其制作
格式:pdf
大小:1.1MB
頁數:11P
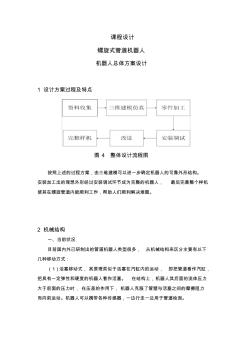
課程設計 螺旋式管道機器人 機器人總體方案設計 1設計方案過程及特點 按照上述的過程方案,由三維建模可以進一步確定機器人的可靠外形結構。 安裝加工出的理想外形經過安裝調試環節成為完整的機器人,最后完善整個樣機 使其在螺旋管道內能順利工作,幫助人們順利解決難題。 2機械結構 一、當前狀況 目前國內外已研制出的管道機器人類型很多,從機械結構來區分主要有以下 幾種移動方式: (1)活塞移動式,其原理類似于活塞在汽缸內的運動,即把管道看作汽缸, 把具有一定彈性和硬度的機器人看作活塞。在結構上,機器人其后面的流體壓力 大于前面的壓力時,在壓差的作用下,機器人克服了管壁與活塞之間的摩擦阻力 而向前運動。機器人可以攜帶各種傳感器,一邊行走一邊用于管道檢測。 圖4整體設計流程圖 (2)滾輪移動式,利用滾輪驅動式的行走結構,以電機作原動機,為了增 加牽引力,一般采用多輪驅動式,由于
 支承輪式管道機器人變徑機構動力學分析
支承輪式管道機器人變徑機構動力學分析 支承輪式管道機器人變徑機構動力學分析
格式:pdf
大小:207KB
頁數:4P
介紹了4種支承輪式管道機器人變徑方案的工作原理,比較分析得出絲杠螺母副變徑機構具有更高的驅動效率。在此基礎上,基于虛功原理分析了絲杠螺母—支承桿變徑機構的驅動特性,并應用多體動力學仿真軟件adams對其進行了動力學仿真驗證,結果顯示絲杠螺母—支承桿變徑機構具有更高的驅動效率和更強的管徑適應能力,并給出了其驅動電動機隨管徑變化的一般動力學特性,為支承輪式管道機器人推廣應用奠定了基礎。
編輯推薦下載
管道機器人彎管通過性的分析 管道機器人彎管通過性的分析
格式:pdf
大小:484KB
頁數:3P
4.6
討論了管道機器人的數學模型,并且對垂直彎管和分支管道的通過性做了分析。通過建立機器人的幾何方程,使得機器人可能通過各種彎管。其結果可對機器人的動靜態特性研究提供一定的參考。
基于火炮身管測量的管道機器人 基于火炮身管測量的管道機器人
格式:pdf
大小:642KB
頁數:4P
4.4
針對帶膛線身管這一特殊的測量對象,研制了一種能自動測量火炮膛線的新型管道機器人.分析了該機器人的機構組成及工作原理,研究了其運動學和力學特性.實驗證明,該機器人測量精度達到0.002mm,多次測量的重復性誤差小于0.002mm,并且可靠性高.
遺傳算法的輪式管道機器人的參數優化熱門文檔
一種單向伸縮式管道機器人系統的建模與仿真 一種單向伸縮式管道機器人系統的建模與仿真
格式:pdf
大小:874KB
頁數:4P
4.5
介紹了基于單向運動機構的伸縮式管道機器人工作原理,對管道機器人整機系統進行合理簡化,得到等效系統模型。根據等效模型,分析直流伺服電機、滾珠絲杠,以及單向運動機構的動力學行為。為了研究系統的輸入電壓信號和輸出的運動速度之間的關系,建立了機器人系統的完整框圖模型。利用matlab對機器人系統進行仿真,分析不同輸入信號下系統的響應特性,為管道機器人的機構設計和控制器設計提供理論依據。
可變徑管道機器人系統的設計與研究
格式:pdf
大小:422KB
頁數:4P
4.4
第41卷2013年第4期 本 欄 目 編 輯 陸 秋 云 通 用 124 可變徑管道機器人系統的 設計與研究 武 燕1,王才東2,王新杰2,牛志軍2 1 河南機電職業學院機械工程系 河南鄭州 451191 2 鄭州輕工業學院機電工程學院 河南鄭州 450002 摘要:筆者在分析管道機器人國內外發展現狀基礎上,針對管道機器人對不同管徑需求,提出了一種 雙履帶式可變徑管道機器人的總體方案。設計了機器人的驅動裝置、直徑調節機構等關鍵部件,并設 計了機器人的控制系統,該控制系統上采用了上、下位機控制結構,通過手動和自動2種控制模式, 實現機器人無級調速、前進、后退、轉彎和圖像信息采集等功能。研究結果為可變徑管道機器人的實 用化開發奠定了基礎。 關鍵詞:管道機器人;變管徑;穿纜;控制系統 中圖分類號:tp242 文獻標志碼:a 文章編號:1001-3954
基于凸輪自鎖原理的伸縮式管道機器人設計 基于凸輪自鎖原理的伸縮式管道機器人設計
格式:pdf
大小:886KB
頁數:6P
4.7
為提高伸縮式管道機器人的負載能力,研制一種基于凸輪自鎖原理的伸縮式管道機器人,牽引力不受限于某一固定摩擦力,可隨外載荷的增大而增大。應用分析力學原理導出單向鎖止機構各參數應滿足的關系式,并給出可適應管徑變化的凸輪輪廓設計方法,計算出移動機構系統的響應時間,提出一套系統的管道機器人設計理論方法。利用提出的設計方法研制試驗樣機,并在管道中成功進行一系列試驗。研究成果提升了伸縮式管道機器人的負載能力與管道適應性,完善了基于自鎖原理伸縮式管道機器人的設計理論。
管道機器人移動牽引機構設計 管道機器人移動牽引機構設計
格式:pdf
大小:218KB
頁數:3P
4.8
管道機器人是特種機器人研究領域中的熱點.該文設計了管道機器人蠕動式移動牽引機構,采用電機驅動絲杠正反轉,絲杠上絲杠螺母前移,前后兩組支撐腿臂交替支撐住管壁,從而實現了機器人的蠕動式前行的驅動方案,并設計了該系統的電控部分.模擬管道中的實驗驗證了該方案的可行性.
遺傳算法的輪式管道機器人的參數優化精華文檔
管道機器人在彎道處通過性的研究 管道機器人在彎道處通過性的研究
格式:pdf
大小:462KB
頁數:6P
4.6
提出了一種描述管道機器人彎道通過性的數學模型,該模型由一組組合約束構成.通過對約束方程的分析討論,得出了規律性的結論.管道機器人在彎道處的姿態、單元體的幾何尺寸、行走輪結構形式對其通過性都有不同程度的影響.所提出數學模型是管道機器人彎道自主行走控制策略設計和相應結構設計的理論基礎.

電纜管道機器人視頻監測系統的開發
格式:pdf
大小:4.5MB
頁數:97P
4.7
上海交通大學 碩士學位論文 電纜管道機器人視頻監測系統的開發 姓名:戚偉 申請學位級別:碩士 專業:電力電子與電力傳動 指導教師:黃成軍;江秀臣 20080101 上海交通大學碩士學位論文 -i- 電纜管道機器人視頻監測系統的開發 摘要 隨著城市電網的大規模建設,電力電纜采用自動化敷設方法,可以 避免人工敷設帶來的效率低下、操作不便等諸多問題,改善電纜敷設質 量,延長電纜使用壽命,保證客戶可靠用電。 本文介紹了一種新型可靠的電纜管道機器人系統,通過前端的攝像 監測裝置實時監視管道前方及管壁的圖像,不僅能在機器人穿越管道的 同時,完成敷設電纜的要求;而且能夠對管道中的土建殘渣進行清掃, 有效地促進電纜排管土建質量及電纜施工中的敷設質量,為電纜敷設提 供了有效的輔助手段。通過該儀器的使用,能夠降低電纜損傷事故、延 長電纜使用壽命,具有廣泛的社會及經濟效益。 本文涉及的電纜管道機器人系

一種新型中央空調管道機器人的設計
格式:pdf
大小:242KB
頁數:3P
4.3
論文根據集中空調管道清掃的特點,設計了一種新型的空調管道機器人,并以自行研發的集中空調管道機器人樣機為例,介紹了其傳動機構、運動機構的設計,系統功能的實現以及由些引出來上位機與下位機的通信方式的問題。設計中采用三輪三角形布置的輪式移動載體,選用rs-485作為通信電氣標準,實現51單片機控制端與pc機的通信。在操作員的遠距離遙控操作下,空調管道機器人在管道內部自動行走,并攜有操作機構和輔助設備(ccd攝像機、管道清潔掃等),進行一系列管道清掃作業。
基于NSGA-II算法的管道清灰機器人變徑機構優化 基于NSGA-II算法的管道清灰機器人變徑機構優化
格式:pdf
大小:529KB
頁數:4P
4.5
管道清灰機器人變徑機構尺度影響機構的運動性能及驅動性能,變徑機構尺度優化可有效解決尺寸綜合問題。提出了變徑機構多目標尺度綜合,以變徑機構關鍵零件受力和驅動件運動范圍為優化目標建立優化模型,基于快速含有精英策略的非支配排序遺傳算法(non.dominatedsortinggeneticalgorithmii,nsga—ii)求解多目標優化pareto最優解。計算結果表明:多目標優化后的變徑機構在力學性能和運動范圍上優于經驗設計,不需重復計算可根據設計要求和工程經驗權衡選取滿足不同要求的優化結果。
管道機器人智能電纜絞盤恒張力控制的研究 管道機器人智能電纜絞盤恒張力控制的研究
格式:pdf
大小:1.6MB
頁數:5P
4.8
針對管道機器人在后退過程中需要借助人手動來收線的問題,提出了一種智能化的電纜絞盤系統,它是通過管道機器人爬行器和絞盤間電纜的恒張力控制來實現的。由此建立了基于模糊控制的恒張力模型,并利用matlab軟件對張力控制系統進行了仿真研究,結果表明該方法是可行的,基于模糊控制的恒張力系統在機器人系統中具有很好的應有價值。
遺傳算法的輪式管道機器人的參數優化最新文檔
管道機器人視頻采集及監控系統設計 管道機器人視頻采集及監控系統設計
格式:pdf
大小:293KB
頁數:4P
4.7
針對管道機器人的工作特點,提出了一種管道機器人視頻監控系統。系統采用光纖傳輸視頻和數據的復合信號,利用視頻光端機進行信號的復合和分離,基于directshow框架開發視頻采集系統,通過modbus協議完成主機與管道機器人的數據通信,從而實現了管道內部視頻圖像的實時采集和管道機器人的實時監控。
一種內螺旋管道機器人 一種內螺旋管道機器人
格式:pdf
大小:265KB
頁數:6P
4.5
提出了一種內螺旋管道機器人(簡稱內螺旋機器人)。設計了該機器人的結構,建立了機器人的動力學方程,數值計算了機器人在管道內運行時管道內壁所受的壓力、機器人的軸向推進力和液體對機器人的周向阻力矩。結果表明,當驅動為外磁場驅動時,內螺旋機器人軸向推進力和周向阻力矩都會增大,但對管道壁的損傷也會增大。以機器人軸向推進力和能效指標為優化目標,采用正交優化方法得到一組最優的內螺旋槽幾何參數。根據內螺旋機器人的工作原理,設計制造了內螺旋驅動樣機,該樣機在充滿201甲基硅油管道中的運行實驗證明了內螺旋機器人的可行性。提出的內螺旋機器人表面光滑,能懸浮運行,對管壁的損傷小,可用于人體內腔的微細管道中。
蠕動式排水管道機器人研制 蠕動式排水管道機器人研制
格式:pdf
大小:293KB
頁數:4P
4.4
簡要綜述了國內外排水管道清淤作業機器人的結構方案,分析了各自特點和局限性。提出了一種基于組合機構的新型蠕動式排水管道機器人。給出了機器人主要結構組成,以及行走機理分析,建立了其行走運動模型和驅動力矩分析模型,給出了主要影響參數以及數值分析。最后,建立了機器人的虛擬樣機,完成了其虛擬樣機仿真分析。綜合理論數值分析和虛擬樣機仿真分析驗證了方案的可行性和設計理論及分析結論是正確的。該方案的排水管道清淤作業機器人具有大拖動力、作業距離長的特點。
面向矩形管道的管道機器人自適應調節機構的研究 面向矩形管道的管道機器人自適應調節機構的研究
格式:pdf
大小:563KB
頁數:4P
4.6
根據管道機器人管內適應性的要求,提出一種面向矩形管道的新型自適應調節機構的設計方案。分析該機構的工作原理、力學特性,建立其數學模型并進行仿真分析。仿真結果表明:該機構提高了管內機器人對矩形管道的適應性,并改善了牽引能力,為機構參數的合理選取提供了科學依據。
三軸差動式管道機器人驅動單元彎管通過性研究 三軸差動式管道機器人驅動單元彎管通過性研究
格式:pdf
大小:1.3MB
頁數:5P
4.3
為了描述三軸差動式管道機器人驅動單元的彎管通過性,建立了驅動單元在彎管處的運動方程與平衡方程,分析了其在彎管處的差速特性與力學特性。理論分析表明,三軸差動式管道機器人驅動單元在彎管處自主差速,無寄生功率產生,驅動輪能夠提供足夠的拖動力,具有良好的機械自適應特性。建立的驅動單元運動方程與平衡方程為三軸差動式管道機器人的機械自適應理論奠定了基礎。
基于電源線載波的有纜管道機器人通信系統 基于電源線載波的有纜管道機器人通信系統
格式:pdf
大小:446KB
頁數:未知
4.3
當有纜管道機器人的線纜長度增加時,其重量大增,與管壁的摩擦力會變得很大,嚴重影響了機器人作業時的最大行走距離及可靠性。為了克服該缺點,本文采用kq-100e電源線載波調制解調模塊,給出了載波電路圖,制定了通信協議,描述了通信流程,從而實現了線纜內電源線與信號線的復用。該研究成果已應用于中央空調風管清潔機器人中。應用結果表明,該通信系統大大減輕了線纜與管壁的摩擦力,提高了管道機器人的可靠性,增大了其作業時的最大行走距離。
基于遺傳算法的蝸桿蝸輪優化設計 基于遺傳算法的蝸桿蝸輪優化設計
格式:pdf
大小:187KB
頁數:未知
4.7
以蝸輪的有色金屬齒圈體積最小為目標函數,并從設計經驗本身、運動性能、邊界條件等方面建立合理的約束條件,建立了蝸輪齒圈的優化設計數學模型。應用matlab遺傳算法工具箱尋求全局最優解。優化結果表明,采用遺傳算法能夠快捷有效地對蝸桿齒輪進行優化設計,是對蝸桿齒輪優化設計的一種有效方法。

基于遺傳算法的項目管理優化仿真研究
格式:pdf
大小:255KB
頁數:4P
4.4
傳統的項目進度一維優化擴展至有偏好的二維目標(進度、成本)優化,同時將成本優化目標分解為項目成本大小以及資源均衡度從而構成三維目標優化,將無資源約束的環境擴展至資源約束下的復雜環境,將局部搜索優化領域擴展至全局范圍內的優化.在內容上,先對項目的單目標優化管理理論進行詳盡研究并指出其現實的局限性,同時提出了智能啟化式方法-遺傳算法在資源約束下項目管理優化方面的優勢.在此基礎上本文構建了基于三維目標偏好的項目管理優化仿真模型,解決了項目管理優化理論中最為重要的兩大問題:資源約束下的項目進度優化以及資源約束下的三維目標(項目進度、項目成本以及資源均衡度)的優化問題.為了驗證此模型對以上問題的有效性,本文應用matlab仿真技術進行仿真模擬并與傳統方法做比較,從結果可以看出遺傳算法能夠更好的解決此類問題.
遺傳算法的輪式管道機器人的參數優化相關
文輯推薦
知識推薦
百科推薦


職位:木門結構工程師
擅長專業:土建 安裝 裝飾 市政 園林


