

機(jī)載座艙面板控制模塊通用測(cè)試系統(tǒng)設(shè)計(jì)
格式:pdf
大小:268KB
頁(yè)數(shù):4P
人氣 :61
 4.7
4.7
目前,機(jī)載座艙面板控制模塊生產(chǎn)維修測(cè)試中主要依靠手動(dòng)測(cè)試、整機(jī)聯(lián)調(diào)測(cè)試,這些測(cè)試方法使系統(tǒng)測(cè)試繁瑣,不具備通用性,且費(fèi)用高。研究了一種基于PXI主控計(jì)算機(jī)的通用測(cè)試系統(tǒng),主要探討了系統(tǒng)設(shè)計(jì)、系統(tǒng)管理、硬件開發(fā)、軟件開發(fā),以及系統(tǒng)的信息流管理。在工程應(yīng)用中證明,本通用測(cè)試系統(tǒng)能完成各系列座艙面板控制模塊的綜合測(cè)試,并給出測(cè)試結(jié)論以及故障診斷結(jié)果,很好地滿足了各項(xiàng)設(shè)計(jì)要求,明顯提高了機(jī)載面板控制模塊的測(cè)試效率以及維修水平。




相機(jī)控制模塊設(shè)計(jì)
格式:pdf
大小:306KB
頁(yè)數(shù):5P
相機(jī)控制模塊設(shè)計(jì) 1、硬件框架 在相機(jī)的使用中,需要對(duì)相機(jī)進(jìn)行參數(shù)設(shè)置等操作,所以在異纖硬件板卡中添加相機(jī)控制模塊。 在本設(shè)計(jì)中控制模塊通過(guò)兩種方式實(shí)現(xiàn): (a)pc機(jī)通過(guò)板上rs232通訊模塊直接控制相機(jī),進(jìn)行相關(guān)參數(shù)設(shè)置。 (b)pc機(jī)通過(guò)千兆網(wǎng)rj45經(jīng)過(guò)fpga間接控制相機(jī),進(jìn)行相關(guān)參數(shù)設(shè)置。 兩種方式實(shí)現(xiàn)了電平轉(zhuǎn)換及串行通訊功能。模塊的硬件框圖如下所示: 由于控制模塊為控制兩個(gè)相機(jī)的,所以采用了max3232的兩路通道。 2、芯片選型 ds90lv047a:四通道cmos/ttl信號(hào)轉(zhuǎn)換為lvds差分信號(hào)的芯片,采用3.3v直流供電,數(shù)據(jù)傳 輸速率達(dá)400mbps。ds90lv047作為圖像采集卡向相機(jī)發(fā)送外同步觸發(fā)信號(hào)和數(shù)據(jù),滿足設(shè)計(jì) 要求。芯片引腳及功能說(shuō)明見表1。 ds90lv048a:四通道lvds差分信號(hào)轉(zhuǎn)換為cmos信號(hào)的驅(qū)動(dòng)器,
 基于邏輯控制模塊的回收漿除渣控制系統(tǒng)設(shè)計(jì)
基于邏輯控制模塊的回收漿除渣控制系統(tǒng)設(shè)計(jì) 基于邏輯控制模塊的回收漿除渣控制系統(tǒng)設(shè)計(jì)
格式:pdf
大小:1.2MB
頁(yè)數(shù):5P
運(yùn)用現(xiàn)代數(shù)字控制技術(shù),采用logo!通用邏輯控制模塊及其擴(kuò)展模塊,對(duì)回收漿除渣控制系統(tǒng)進(jìn)行了硬件和軟件設(shè)計(jì),并制作了其人機(jī)界面的控制面板,軟件在線仿真結(jié)果表明該系統(tǒng)的正確性、完整性和可行性.
編輯推薦下載
基于VXI總線的控制模塊自動(dòng)檢測(cè)系統(tǒng)設(shè)計(jì) 基于VXI總線的控制模塊自動(dòng)檢測(cè)系統(tǒng)設(shè)計(jì)
格式:pdf
大小:356KB
頁(yè)數(shù):5P
4.7
介紹了基于vxi總線的艇用動(dòng)力監(jiān)控系統(tǒng)控制模塊電路板自動(dòng)檢測(cè)系統(tǒng)設(shè)計(jì)思想,重點(diǎn)討論了系統(tǒng)的軟硬件實(shí)現(xiàn)方法、解決了對(duì)多種控制模塊電路板快速檢測(cè)和故障定位問(wèn)題。該系統(tǒng)經(jīng)實(shí)際應(yīng)用表明,滿足部隊(duì)使用要求,效果良好。
通用改進(jìn)擴(kuò)展Benes型光開關(guān)的控制模塊設(shè)計(jì) 通用改進(jìn)擴(kuò)展Benes型光開關(guān)的控制模塊設(shè)計(jì)
格式:pdf
大小:633KB
頁(yè)數(shù):5P
4.6
分析了通用改進(jìn)擴(kuò)展benes型(gmdb)光開關(guān)結(jié)構(gòu)的特性,提出了路由算法設(shè)計(jì)思路,并詳細(xì)闡述了4×4gmdb光開關(guān)的控制和驅(qū)動(dòng)電路設(shè)計(jì)。測(cè)試結(jié)果表明,設(shè)計(jì)的模塊達(dá)到了控制的要求。
機(jī)載座艙面板控制模塊通用測(cè)試系統(tǒng)設(shè)計(jì)熱門文檔
電機(jī)驅(qū)動(dòng)及控制模塊
格式:pdf
大小:1.2MB
頁(yè)數(shù):5P
4.7
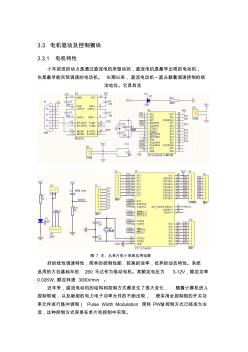
3.3電機(jī)驅(qū)動(dòng)及控制模塊 3.3.1電機(jī)特性 小車前進(jìn)的動(dòng)力是通過(guò)直流電機(jī)來(lái)驅(qū)動(dòng)的,直流電機(jī)是最早出現(xiàn)的電動(dòng)機(jī), 也是最早能實(shí)現(xiàn)調(diào)速的電動(dòng)機(jī)。長(zhǎng)期以來(lái),直流電動(dòng)機(jī)一直占據(jù)著調(diào)速控制的統(tǒng) 治地位。它具有良 圖7主、從單片機(jī)小系統(tǒng)應(yīng)用電路 好的線性調(diào)速特性,簡(jiǎn)單的控制性能,較高的效率,優(yōu)異的動(dòng)態(tài)特性。系統(tǒng) 選用的大谷基礎(chǔ)車的260馬達(dá)作為驅(qū)動(dòng)電機(jī)。其額定電壓為3-12v,額定功率 0.02kw,額定轉(zhuǎn)速3000r/min。 近年來(lái),直流電動(dòng)機(jī)的結(jié)構(gòu)和控制方式都發(fā)生了很大變化,隨著計(jì)算機(jī)進(jìn)入 控制領(lǐng)域,以及新型的電力電子功率元件的不斷出現(xiàn),使采用全控制型的開關(guān)功 率元件進(jìn)行脈沖調(diào)制(pulsewidthmodulation簡(jiǎn)稱pwm)控制方式已經(jīng)成為主 流,這種控制方式容易在單片機(jī)控制中實(shí)現(xiàn)。 pwm技術(shù)的具體有點(diǎn): 調(diào)速范圍寬,可以使電機(jī)安全地工作在每分鐘幾轉(zhuǎn)
電機(jī)驅(qū)動(dòng)及控制模塊
格式:pdf
大小:2.7MB
頁(yè)數(shù):5P
4.3
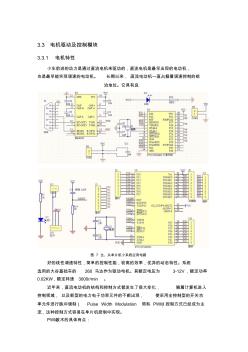
3.3電機(jī)驅(qū)動(dòng)及控制模塊 3.3.1電機(jī)特性 小車前進(jìn)的動(dòng)力是通過(guò)直流電機(jī)來(lái)驅(qū)動(dòng)的,直流電機(jī)是最早出現(xiàn)的電動(dòng)機(jī), 也是最早能實(shí)現(xiàn)調(diào)速的電動(dòng)機(jī)。長(zhǎng)期以來(lái),直流電動(dòng)機(jī)一直占據(jù)著調(diào)速控制的統(tǒng) 治地位。它具有良 圖7主、從單片機(jī)小系統(tǒng)應(yīng)用電路 好的線性調(diào)速特性,簡(jiǎn)單的控制性能,較高的效率,優(yōu)異的動(dòng)態(tài)特性。系統(tǒng) 選用的大谷基礎(chǔ)車的260馬達(dá)作為驅(qū)動(dòng)電機(jī)。其額定電壓為3-12v,額定功率 0.02kw,額定轉(zhuǎn)速3000r/min。 近年來(lái),直流電動(dòng)機(jī)的結(jié)構(gòu)和控制方式都發(fā)生了很大變化,隨著計(jì)算機(jī)進(jìn)入 控制領(lǐng)域,以及新型的電力電子功率元件的不斷出現(xiàn),使采用全控制型的開關(guān)功 率元件進(jìn)行脈沖調(diào)制(pulsewidthmodulation簡(jiǎn)稱pwm)控制方式已經(jīng)成為主 流,這種控制方式容易在單片機(jī)控制中實(shí)現(xiàn)。 pwm技術(shù)的具體有點(diǎn): 調(diào)速范圍寬,可以使電機(jī)安全地工作在每分鐘

電機(jī)控制模塊MCM簡(jiǎn)介
格式:pdf
大小:213KB
頁(yè)數(shù):1P
4.6
北京市朝陽(yáng)區(qū)朝外大街22號(hào) 泛利大廈618室100020 eimcontrolsbeijingrepresentativeoffice room618,primetower no.22chaowaiavenue, beijing,100020china phone:+861065889928 fax:+861065889929 website:http://www.***.*** http://www.***.*** 電機(jī)控制模塊(mcm—motorcontrolmodule) 一、電機(jī)控制模塊的主要功能: 1、電動(dòng)機(jī)運(yùn)動(dòng)控制和保護(hù): 包括正反轉(zhuǎn)控制,啟動(dòng)停止控制,電動(dòng)機(jī)過(guò)載保護(hù),電動(dòng)機(jī)過(guò)熱保護(hù); 2、為內(nèi)部控制模塊提供電源供應(yīng); 3、供電電源相位檢測(cè)及糾正: 通過(guò)使用電源相位監(jiān)視器連續(xù)的監(jiān)測(cè)電源相
數(shù)字電源控制模塊的設(shè)計(jì)
格式:pdf
大小:334KB
頁(yè)數(shù):6P
4.6
第43卷第11期原子能科學(xué)技術(shù)vol.43,no.11 2009年11月atomicenergyscienceandtechnologynov.2009 數(shù)字電源控制模塊的設(shè)計(jì) 龍鋒利,程健 (中國(guó)科學(xué)院高能物理研究所,北京100049) 摘要:為加速器高精度磁鐵穩(wěn)流電源設(shè)計(jì)了數(shù)字電源控制模塊dpscm,以硬開關(guān)拓?fù)浣Y(jié)構(gòu)的磁鐵電源 作為被控對(duì)象,實(shí)現(xiàn)電源的全數(shù)字化控制。dpscm以現(xiàn)場(chǎng)可編程門陣列fpga為控制部件,實(shí)現(xiàn)對(duì)高 精度adc和dac的控制,由數(shù)字調(diào)節(jié)器產(chǎn)生高精度數(shù)字脈寬調(diào)制信號(hào),并實(shí)現(xiàn)電源的邏輯控制和聯(lián)鎖 保護(hù)功能。通過(guò)模擬負(fù)載測(cè)試了dpscm的基本功能,并在數(shù)字電源樣機(jī)上測(cè)試了dpscm長(zhǎng)期運(yùn)行的 可靠性及穩(wěn)定性,樣機(jī)電源連續(xù)運(yùn)行72h,電流穩(wěn)
數(shù)字電源控制模塊的設(shè)計(jì) 數(shù)字電源控制模塊的設(shè)計(jì)
格式:pdf
大小:1.0MB
頁(yè)數(shù):6P
4.3
為加速器高精度磁鐵穩(wěn)流電源設(shè)計(jì)了數(shù)字電源控制模塊dpscm,以硬開關(guān)拓?fù)浣Y(jié)構(gòu)的磁鐵電源作為被控對(duì)象,實(shí)現(xiàn)電源的全數(shù)字化控制。dpscm以現(xiàn)場(chǎng)可編程門陣列fpga為控制部件,實(shí)現(xiàn)對(duì)高精度adc和dac的控制,由數(shù)字調(diào)節(jié)器產(chǎn)生高精度數(shù)字脈寬調(diào)制信號(hào),并實(shí)現(xiàn)電源的邏輯控制和聯(lián)鎖保護(hù)功能。通過(guò)模擬負(fù)載測(cè)試了dpscm的基本功能,并在數(shù)字電源樣機(jī)上測(cè)試了dpscm長(zhǎng)期運(yùn)行的可靠性及穩(wěn)定性,樣機(jī)電源連續(xù)運(yùn)行72h,電流穩(wěn)定度優(yōu)于5×10-5。
機(jī)載座艙面板控制模塊通用測(cè)試系統(tǒng)設(shè)計(jì)精華文檔
基于在線編程的船載負(fù)荷吊重控制模塊 基于在線編程的船載負(fù)荷吊重控制模塊
格式:pdf
大小:445KB
頁(yè)數(shù):2P
4.5
本文設(shè)計(jì)一個(gè)船載起重機(jī)的監(jiān)控系統(tǒng),此控制系統(tǒng)能實(shí)現(xiàn)危險(xiǎn)預(yù)報(bào)警,超程報(bào)警并能在超程時(shí)對(duì)起重機(jī)采取緊急的預(yù)警措施。起重機(jī)不同的工況下對(duì)起重機(jī)的進(jìn)行安全監(jiān)控;能夠?qū)崟r(shí)測(cè)量起重臂角度、起吊重量和起吊高度等參數(shù);安全控制器能實(shí)時(shí)提供顯示主副吊鉤的負(fù)荷率,實(shí)際負(fù)重,起重角度和實(shí)際起重高度。整個(gè)控制模塊采用at89s51作為核心處理芯片。整體功能由mcu、遠(yuǎn)程信號(hào)采集、a/d轉(zhuǎn)換,人機(jī)交互和其他外圍電路五大部分來(lái)完成。
溫度自動(dòng)控制模塊的設(shè)計(jì) 溫度自動(dòng)控制模塊的設(shè)計(jì)
格式:pdf
大小:452KB
頁(yè)數(shù):4P
4.5
為解決工業(yè)生產(chǎn)中溫度的控制問(wèn)題,通過(guò)對(duì)相關(guān)產(chǎn)品工藝要求的分析,找出存在的問(wèn)題,運(yùn)用冷、熱交換器結(jié)合pid控制的方法,使得產(chǎn)品所需溫度得到有效控制,從而滿足工業(yè)生產(chǎn)的需要。
VoIP語(yǔ)音網(wǎng)關(guān)中TDM控制模塊的設(shè)計(jì) VoIP語(yǔ)音網(wǎng)關(guān)中TDM控制模塊的設(shè)計(jì)
格式:pdf
大小:951KB
頁(yè)數(shù):3P
4.7
用verilog硬件描述語(yǔ)言實(shí)現(xiàn)voip語(yǔ)音網(wǎng)關(guān)芯片上的tdm(時(shí)分復(fù)用)控制模塊,包括模塊的結(jié)構(gòu)設(shè)計(jì)和fifo緩存機(jī)制,并且以voip語(yǔ)音網(wǎng)關(guān)系統(tǒng)為平臺(tái)對(duì)模塊進(jìn)行了驗(yàn)證
視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn) 視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn)
格式:pdf
大小:419KB
頁(yè)數(shù):3P
4.6
介紹了一種基于arm嵌入式系統(tǒng)和飛思卡爾單片機(jī)的網(wǎng)絡(luò)視頻監(jiān)控系統(tǒng)中攝像頭云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn)。云臺(tái)控制模塊屬于整個(gè)系統(tǒng)的一個(gè)功能模塊,首先arm端發(fā)送一組云臺(tái)轉(zhuǎn)動(dòng)的控制命令,經(jīng)arm芯片的gpio引腳傳送到單片機(jī),單片機(jī)采集到信號(hào)之后將云臺(tái)轉(zhuǎn)動(dòng)命令轉(zhuǎn)換成云臺(tái)控制信號(hào),從而完成整個(gè)控制過(guò)程。

視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn)
格式:pdf
大小:12KB
頁(yè)數(shù):1P
4.3
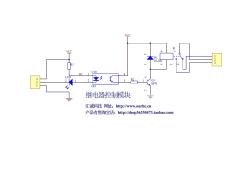
視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn) 隨著多媒體技術(shù)和網(wǎng)絡(luò)通信技術(shù)的迅速發(fā)展,視頻監(jiān)控技術(shù)在國(guó)民生產(chǎn)生 活的各個(gè)領(lǐng)域得到了廣泛應(yīng)用。而云臺(tái)控制系統(tǒng)的出現(xiàn)為增加視頻監(jiān)控系統(tǒng)的 監(jiān)控范圍、提高攝像頭的監(jiān)控效率起到了巨大作用。對(duì)于云臺(tái)控制系統(tǒng),參考 文獻(xiàn)[1]提出了基于dsp芯片的云臺(tái)控制系統(tǒng),參考文獻(xiàn)[2]提出了在visual c++編程中利用activex控件實(shí)現(xiàn)云臺(tái)控制的方案。但是,這些方案由于沒有 現(xiàn)成的開發(fā)工具支持,開發(fā)周期長(zhǎng)、成本高且開發(fā)出來(lái)的系統(tǒng)在網(wǎng)絡(luò)環(huán)境不佳 時(shí),運(yùn)行不夠穩(wěn)定。針對(duì)這種情況,以及arm11微處理器具有優(yōu)異的多媒體 數(shù)據(jù)處理能力和高度智能化的特點(diǎn),本文提出了運(yùn)用net-snmp開發(fā)工具,通 過(guò)在嵌入式arm11平臺(tái)上移植snmp代理的方法實(shí)現(xiàn)ip網(wǎng)上云臺(tái)的遠(yuǎn)程控制 方案。 1基于arm11的嵌入式視頻監(jiān)控系統(tǒng) 如圖1所
機(jī)載座艙面板控制模塊通用測(cè)試系統(tǒng)設(shè)計(jì)最新文檔
人防報(bào)警系統(tǒng)中控制模塊的設(shè)計(jì) 人防報(bào)警系統(tǒng)中控制模塊的設(shè)計(jì)
格式:pdf
大小:177KB
頁(yè)數(shù):3P
4.8
本文針對(duì)人防報(bào)警系統(tǒng)的控制模塊進(jìn)行設(shè)計(jì),針對(duì)單片-機(jī)端口數(shù)目有限、端口驅(qū)動(dòng)能力較弱等問(wèn)題,使用鍵盤管理芯片max72i9實(shí)現(xiàn)數(shù)碼管顯示驅(qū)動(dòng),用ds1302實(shí)現(xiàn)真時(shí)鐘顯示,節(jié)省了單片機(jī)i/o口,電路連接簡(jiǎn)單。并給出了以上系統(tǒng)設(shè)計(jì)時(shí)的軟件流程,將各系統(tǒng)的實(shí)現(xiàn)分為不同功能模塊,以便于軟件維護(hù)和修改,同時(shí)簡(jiǎn)單介紹了一些抗干擾措施。
視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn) 視頻監(jiān)控系統(tǒng)中云臺(tái)控制模塊的設(shè)計(jì)與實(shí)現(xiàn)
格式:pdf
大小:308KB
頁(yè)數(shù):4P
4.3
針對(duì)目前嵌入式視頻監(jiān)控系統(tǒng)中,云臺(tái)控制模塊開發(fā)周期長(zhǎng)且運(yùn)行不穩(wěn)定的問(wèn)題,提出了基于簡(jiǎn)單網(wǎng)絡(luò)管理協(xié)議(snmp)的遠(yuǎn)程云臺(tái)控制方案。該方案運(yùn)用net-snmp作為開發(fā)工具,通過(guò)擴(kuò)展mib庫(kù)在嵌入式系統(tǒng)上移植snmp代理,成功地實(shí)現(xiàn)了ip網(wǎng)上云臺(tái)的遠(yuǎn)程控制。實(shí)驗(yàn)表明,該方案不僅穩(wěn)定可靠而且開發(fā)周期短,已被運(yùn)用于某單位的視頻監(jiān)控系統(tǒng)中。

智能照明控制模塊
格式:pdf
大小:1.6MB
頁(yè)數(shù):6P
4.7
智能照明控制模塊 上海紅申電氣有限公司(簡(jiǎn)稱:上海紅申電氣)專注于物聯(lián)網(wǎng) 應(yīng)用,是一家集產(chǎn)品研發(fā)、生產(chǎn)、銷售、工程實(shí)施、售后服務(wù)及整體 解決方案供應(yīng)為一體的高新技術(shù)企業(yè),也是北京市認(rèn)定的軟件企業(yè)。 公司擁有一批意識(shí)超前,銳意進(jìn)取,技術(shù)過(guò)硬的管理專家、技術(shù)專家 和研發(fā)工程師隊(duì)伍,不僅具有極強(qiáng)的產(chǎn)品研發(fā)生產(chǎn)能力,更具有極強(qiáng) 的工程現(xiàn)場(chǎng)支援能力和豐富的工程實(shí)施經(jīng)驗(yàn)。 上海紅申電氣深刻理解物聯(lián)網(wǎng)行業(yè)應(yīng)用及城市智能化管理本質(zhì), 堅(jiān)持“技術(shù)創(chuàng)新,應(yīng)用為本”,緊密跟蹤行業(yè)前沿科技動(dòng)態(tài),結(jié)合客 戶應(yīng)用需求,從先進(jìn)、實(shí)用、易用、耐用出發(fā),不斷探索,刻意實(shí)踐, 追求卓越,為客戶提供功能完善、性能穩(wěn)定的高品質(zhì)產(chǎn)品和完善的整 體解決方案。 上海紅申電氣現(xiàn)在已形成以智能照明控制系統(tǒng)、照明智能控制終 端、無(wú)線數(shù)據(jù)傳輸終端等三大系列50余個(gè)品種的產(chǎn)品體系。上海紅 申電氣獨(dú)立研發(fā)并擁有完全自主知識(shí)產(chǎn)權(quán)的

LED燈光控制模塊
格式:pdf
大小:106KB
頁(yè)數(shù):2P
4.6
智能照明控制系統(tǒng):燈光控制模塊 【產(chǎn)品名稱】燈光控制模塊 【產(chǎn)品規(guī)格】a1-mlc系列 詳細(xì)說(shuō)明 序號(hào)型號(hào)規(guī)格 1mlc-1304/14路1a繼電器輸出 2mlc-1304/34路3a繼電器輸出 3mlc-1304/54路5a繼電器輸出 4mlc-1304/104路10a繼電器輸出 5mlc-1308/18路1a繼電器輸出 6mlc-1308/38路3a繼電器輸出 7mlc-1308/58路5a繼電器輸出 8mlc-1308/108路10a繼電器輸出 9mlc-1302/1a2路1a繼電器輸出,帶電流檢測(cè) 10mlc-1302/3a2路3a繼電器輸出,帶電流檢測(cè) 11mlc-1302/5a2路5a繼電器輸出,帶電流檢測(cè) 12mlc-1302/10a2路10
 控制模塊包括主控制模塊和各級(jí)控制模塊
控制模塊包括主控制模塊和各級(jí)控制模塊 控制模塊包括主控制模塊和各級(jí)控制模塊
格式:doc
大小:56KB
頁(yè)數(shù):5P
4.8
本文將對(duì)建設(shè)工程領(lǐng)域中的控制模塊進(jìn)行比較和對(duì)比,重點(diǎn)關(guān)注主控制模塊和各級(jí)控制模塊之間的區(qū)別和聯(lián)系。通過(guò)詳細(xì)的說(shuō)明和分析,幫助讀者更好地理解這兩種控制模塊在建設(shè)工程中的作用和功能。
基于嵌入式系統(tǒng)的實(shí)時(shí)控制模塊設(shè)計(jì)與實(shí)現(xiàn) 基于嵌入式系統(tǒng)的實(shí)時(shí)控制模塊設(shè)計(jì)與實(shí)現(xiàn)
格式:pdf
大小:404KB
頁(yè)數(shù):未知
4.6
提出一個(gè)使用c51單片機(jī)的嵌入式系統(tǒng)在通信測(cè)試儀器中實(shí)現(xiàn)實(shí)時(shí)控制功能的案例,給出了硬件及軟件設(shè)計(jì)方案,并指出了設(shè)計(jì)中需注意的問(wèn)題。該設(shè)計(jì)成功地應(yīng)用于某通信測(cè)試儀器中,較好地實(shí)現(xiàn)了預(yù)期的目標(biāo)。
隔振設(shè)計(jì)在計(jì)算機(jī)控制模塊上的應(yīng)用 隔振設(shè)計(jì)在計(jì)算機(jī)控制模塊上的應(yīng)用
格式:pdf
大小:178KB
頁(yè)數(shù):未知
4.8
惡劣環(huán)境條件下,計(jì)算機(jī)控制模塊的隔振設(shè)計(jì)直接影響計(jì)算機(jī)整體性能;采取隔振設(shè)計(jì)營(yíng)造平穩(wěn)環(huán)境,可降低振動(dòng)對(duì)計(jì)算機(jī)模塊的影響。從振動(dòng)的基本原理出發(fā),在對(duì)傳統(tǒng)的隔振傳遞率分析的基礎(chǔ)上,分析了計(jì)算機(jī)控制模塊的隔振設(shè)計(jì),并探討了相關(guān)的減振選型及隔振器材質(zhì)的選型。
機(jī)載座艙面板控制模塊通用測(cè)試系統(tǒng)設(shè)計(jì)相關(guān)
文輯推薦
知識(shí)推薦
百科推薦


職位:化工工程師助理
擅長(zhǎng)專業(yè):土建 安裝 裝飾 市政 園林


