

單邊復(fù)合次級直線感應(yīng)電機(jī)的多層傅利葉分析
格式:pdf
大小:132KB
頁數(shù):7P
人氣 :77
 4.4
4.4
使用傅利葉方法求解單邊復(fù)合次級直線感應(yīng)電機(jī)的二維模型場,將次級場域分成多層,較為準(zhǔn)確地求解了電機(jī)的磁場分布和運(yùn)行特性,實(shí)驗(yàn)結(jié)果證明了方法的有效性.



感應(yīng)電機(jī).
格式:pdf
大小:78KB
頁數(shù):10P
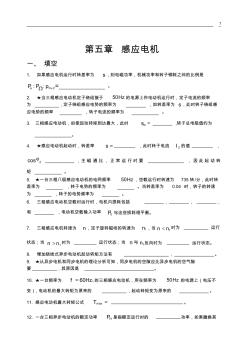
1 第五章感應(yīng)電機(jī) 一、填空 1.如果感應(yīng)電機(jī)運(yùn)行時轉(zhuǎn)差率為s,則電磁功率,機(jī)械功率和轉(zhuǎn)子銅耗之間的比例是 2:p:ecupp=。 2.★當(dāng)三相感應(yīng)電動機(jī)定子繞組接于hz50的電源上作電動機(jī)運(yùn)行時,定子電流的頻率 為,定子繞組感應(yīng)電勢的頻率為,如轉(zhuǎn)差率為s,此時轉(zhuǎn)子繞組感 應(yīng)電勢的頻率,轉(zhuǎn)子電流的頻率為。 3.三相感應(yīng)電動機(jī),如使起動轉(zhuǎn)矩到達(dá)最大,此時ms=,轉(zhuǎn)子總電阻值約為 。 4.★感應(yīng)電動機(jī)起動時,轉(zhuǎn)差率s,此時轉(zhuǎn)子電流2i的值, 2cos,主磁通比,正常運(yùn)行時要,因此起動轉(zhuǎn) 矩。 5.★一臺三相八極感應(yīng)電動機(jī)的電網(wǎng)頻率hz50,空載運(yùn)行時轉(zhuǎn)速為735轉(zhuǎn)/分,此時轉(zhuǎn) 差率為,轉(zhuǎn)子電勢的頻率為。當(dāng)轉(zhuǎn)差率為0.04時,轉(zhuǎn)子的轉(zhuǎn)速 為,轉(zhuǎn)子的電勢頻率為。 6.三相
編輯推薦下載
感應(yīng)電機(jī)例題(1)
格式:pdf
大小:97KB
頁數(shù):4P
4.4
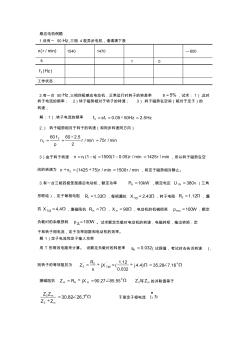
感應(yīng)電機(jī)例題 1.設(shè)有一50hz,三相4極異步電機(jī),請?zhí)顫M下表 (/min)nr15401470—600 s10 2()fhz 工作狀態(tài) 2.有一臺50hz,三相四極感應(yīng)電動機(jī),正常運(yùn)行時轉(zhuǎn)子的轉(zhuǎn)差率5%s,試求:1).此時 轉(zhuǎn)子電流的頻率;2)轉(zhuǎn)子磁勢相對于轉(zhuǎn)子的轉(zhuǎn)速;3).轉(zhuǎn)子磁勢在空間(相對于定子)的 轉(zhuǎn)速; 解:1).轉(zhuǎn)子電流的頻率210.05502.5fsfhzhz 2.)轉(zhuǎn)子磁勢相對于轉(zhuǎn)子的轉(zhuǎn)速(和同步轉(zhuǎn)速同方向) 2 2 60602.5 /min75/min 2 f nrr p 3)由于轉(zhuǎn)子轉(zhuǎn)速1(1)1500(10.05)/min1425/minnnsrr,所以轉(zhuǎn)子磁勢在空 間的轉(zhuǎn)速為2(142575)/min1500/minnnrr
 感應(yīng)電機(jī)的設(shè)計
感應(yīng)電機(jī)的設(shè)計 感應(yīng)電機(jī)的設(shè)計
格式:pdf
大小:66KB
頁數(shù):2P
4.3
感應(yīng)電機(jī)是異步電機(jī)的一種。異步電機(jī)包括感應(yīng)電機(jī)、雙饋異步電機(jī)和交流換向器電機(jī)。由于現(xiàn)在異步電機(jī)主要是感應(yīng)電機(jī),所以現(xiàn)在也有人直接在定義時候?qū)惒诫姍C(jī)定義為感應(yīng)電機(jī)。感應(yīng)電機(jī)具有結(jié)構(gòu)簡單,制造方便,價格便宜,運(yùn)行方便等特點(diǎn)。電機(jī)的設(shè)計對于一個感應(yīng)電機(jī)的性能和參數(shù)有著極其重要的影響。掌握感應(yīng)電機(jī)的設(shè)計構(gòu)造知識,有助于我們?nèi)蘸髮Ω袘?yīng)電機(jī)控制技術(shù)的更深入研究。
單邊復(fù)合次級直線感應(yīng)電機(jī)多層傅利葉分析熱門文檔
第五章感應(yīng)電機(jī)
格式:pdf
大小:82KB
頁數(shù):7P
4.7
第五章感應(yīng)電機(jī) 一、填空 1.★當(dāng)三相感應(yīng)電動機(jī)定子繞組接于hz50的電源上作電動機(jī)運(yùn)行時,定子電流的頻率 為,定子繞組感應(yīng)電勢的頻率為,如轉(zhuǎn)差率為s,此時轉(zhuǎn)子繞組感 應(yīng)電勢的頻率,轉(zhuǎn)子電流的頻率為。 答hz50,hz50,shz50,shz50 2.★感應(yīng)電動機(jī)起動時,轉(zhuǎn)差率s,此時轉(zhuǎn)子電流2i的值, 2cos,主磁通比,正常運(yùn)行時要,因此起動轉(zhuǎn)矩。 答1,很大,很小,小一些,不大 3.★一臺三相八極感應(yīng)電動機(jī)的電網(wǎng)頻率hz50,空載運(yùn)行時轉(zhuǎn)速為735轉(zhuǎn)/分,此時轉(zhuǎn)差 率為,轉(zhuǎn)子電勢的頻率為。當(dāng)轉(zhuǎn)差率為0.04時,轉(zhuǎn)子的轉(zhuǎn)速為, 轉(zhuǎn)子的電勢頻率為。 答0.02,hz1,min/720r,hz2 4.★若感應(yīng)電動機(jī)的漏抗增大,則其起動轉(zhuǎn)矩,其最大轉(zhuǎn)矩。 答減小,減

感應(yīng)電機(jī)的結(jié)構(gòu)和運(yùn)行狀態(tài)
格式:pdf
大小:2.8MB
頁數(shù):24P
4.6
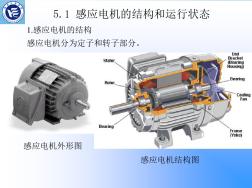
感應(yīng)電機(jī)的結(jié)構(gòu)和運(yùn)行狀態(tài) 一、感應(yīng)電機(jī)的結(jié)構(gòu) 感應(yīng)電機(jī)的定子由定子鐵心、定子繞組和機(jī)座三部分組成。定子鐵心是主磁路的一部分。為 了減少激磁電流和旋轉(zhuǎn)磁場在鐵心中產(chǎn)生的渦流和磁滯損耗,鐵心由厚0.5mm、的硅鋼片疊 成。容量較大的電動機(jī),硅鋼片兩面涂以絕緣漆作為片間絕緣。小型定子鐵心用硅鋼片疊裝、 壓緊成為一個整體后固定在機(jī)座內(nèi);中型和大型定子鐵心由扇形沖片拼成.在定子鐵心內(nèi)圓, 均勻地沖有許多形狀相同的槽,用以嵌放定子繞組。小型感應(yīng)電機(jī)通常采用半閉口槽和由高 強(qiáng)度漆包線繞成的單層(散下式)繞組,線圈與鐵心之間墊有槽絕緣。半閉口槽可以減少主磁 路的磁阻,使激磁電流減少,但嵌線較不方便。中型感應(yīng)電機(jī)通常采用半開口槽。大型高壓 感應(yīng)電機(jī)都用開口槽.以便于嵌線。為了得到較好的電磁性能,中、大型感應(yīng)電機(jī)都采用雙 層短距繞組。 轉(zhuǎn)子由轉(zhuǎn)子鐵心、轉(zhuǎn)子繞組和轉(zhuǎn)軸組成。轉(zhuǎn)子鐵
單邊復(fù)合次級直線感應(yīng)電機(jī)多層傅利葉分析精華文檔
斷路器操動機(jī)構(gòu)用直線感應(yīng)電機(jī)的優(yōu)化設(shè)計 斷路器操動機(jī)構(gòu)用直線感應(yīng)電機(jī)的優(yōu)化設(shè)計
格式:pdf
大小:1.2MB
頁數(shù):6P
4.4
為了得到更大的起動推力,滿足高壓斷路器開斷性能和機(jī)械性能的要求,對操動機(jī)構(gòu)用圓筒型直線感應(yīng)電機(jī)進(jìn)行優(yōu)化設(shè)計,將粒子群優(yōu)化算法引進(jìn)到圓筒型直線感應(yīng)電機(jī)的優(yōu)化設(shè)計之中。并針對此電機(jī)優(yōu)化的具體特點(diǎn),提出將鄰域拓?fù)淞W尤簝?yōu)化算法用于圓筒型直線感應(yīng)電機(jī)的全局優(yōu)化,解決了粒子群優(yōu)化算法中含有局部最優(yōu)解的復(fù)雜優(yōu)化問題,增強(qiáng)了粒子的尋優(yōu)能力。兩種算法的研究結(jié)果表明,與原始方案相比起動推力提高,起動電流大幅度降低,領(lǐng)域拓?fù)淞W尤簝?yōu)化算法優(yōu)化效果顯著。電機(jī)的結(jié)構(gòu)尺寸整體縮小,降低了電機(jī)的質(zhì)量,節(jié)約了材料,證明了領(lǐng)域拓?fù)淞W尤簝?yōu)化算法的優(yōu)越性,提高和完善了圓筒型直線感應(yīng)電機(jī)操動機(jī)構(gòu)的實(shí)用性。
 斷路器操動機(jī)構(gòu)用直線感應(yīng)電機(jī)的設(shè)計與研究
斷路器操動機(jī)構(gòu)用直線感應(yīng)電機(jī)的設(shè)計與研究 斷路器操動機(jī)構(gòu)用直線感應(yīng)電機(jī)的設(shè)計與研究
格式:pdf
大小:268KB
頁數(shù):4P
4.4
針對40.5kv真空斷路器分合閘運(yùn)動特性對操動機(jī)構(gòu)的要求,結(jié)合圓筒型直線感應(yīng)電機(jī)(c-lim)的性能優(yōu)點(diǎn),文章提出了應(yīng)用于高壓斷路器的c-lim操動機(jī)構(gòu)。對斷路器操動機(jī)構(gòu)實(shí)現(xiàn)了整體結(jié)構(gòu)簡單化設(shè)計。結(jié)構(gòu)具有無需傳統(tǒng)操動機(jī)構(gòu)依靠機(jī)械傳動的連桿和鎖扣等復(fù)雜零部件、操作噪聲低、響應(yīng)快速、能優(yōu)化預(yù)定行程曲線、可控性高、易于與綜合自動化監(jiān)視系統(tǒng)的連接和提高狀態(tài)監(jiān)測范圍等優(yōu)點(diǎn),適用于中高壓斷路器的操動機(jī)構(gòu)。文章亦對c-lim磁路分布及各種特性進(jìn)行了有限元分析,驗(yàn)證了c-lim設(shè)計的有效性,并完成了滿足40.5kv真空斷路器工作要求的國內(nèi)首臺c-lim樣機(jī)制作。
電機(jī)控制-AC感應(yīng)電機(jī)(ACIM)概述
格式:pdf
大小:12KB
頁數(shù):1P
4.4
電機(jī)控制-ac感應(yīng)電機(jī)(acim)概述 相關(guān)下載主推產(chǎn)品簡介(點(diǎn)擊下載) 器件型號:rdk-acim(ac感應(yīng)電機(jī)參考設(shè)計套件) 器件型號:tmdshvmtrpfckit(高電壓電機(jī)控制和pfc 開發(fā)者套件) stellarislm3s818acinduction motorreferencedesignkituser’smanual(點(diǎn)擊下載)rdk- acim(ac感應(yīng)電機(jī)參考設(shè)計套件)用戶指 南:stellarislm3s818acimboarddatasheet(點(diǎn)擊下載) tms320c2000motorcontrolprimer(點(diǎn)擊下載)器件型號: tmdshvmtrpfckit(高電壓電機(jī)控制和pfc開發(fā)者套件) ac感應(yīng)電機(jī)(acim)是消費(fèi)電子類應(yīng)用和工業(yè)應(yīng)用中最受歡迎的電機(jī),代表 了工業(yè)
單邊復(fù)合次級直線感應(yīng)電機(jī)多層傅利葉分析最新文檔

感應(yīng)電機(jī)的結(jié)構(gòu)和運(yùn)行狀態(tài) (2)
格式:pdf
大小:8.7MB
頁數(shù):67P
4.3
感應(yīng)電機(jī)的結(jié)構(gòu)和運(yùn)行狀態(tài) (2)
基于MRFAC的感應(yīng)電機(jī)控制器設(shè)計 基于MRFAC的感應(yīng)電機(jī)控制器設(shè)計
格式:pdf
大小:622KB
頁數(shù):5P
4.3
結(jié)合感應(yīng)電機(jī)這一非線性控制對象,設(shè)計了感應(yīng)電機(jī)的模型參考模糊自適應(yīng)速度控制器。該控制器具有傳統(tǒng)模型參考自適應(yīng)控制構(gòu)架,傳統(tǒng)模型參考自適應(yīng)控制系統(tǒng)中的反饋控制器和常規(guī)自適應(yīng)機(jī)構(gòu)分別由主模糊控制器、模糊自適應(yīng)機(jī)構(gòu)替代,模糊逆模型結(jié)合自適應(yīng)調(diào)整算法構(gòu)成的模糊自適應(yīng)機(jī)構(gòu)對主控制器參數(shù)進(jìn)行實(shí)時調(diào)整,以達(dá)到快速適應(yīng)對象參數(shù)和狀態(tài)變化的目的。基于模塊化建模工具matlab/simulink建立感應(yīng)電機(jī)控制系統(tǒng)模型,仿真結(jié)果表明該控制器運(yùn)行平穩(wěn),具有良好的動、靜態(tài)性能。
感應(yīng)電機(jī)智能軟啟動控制器的設(shè)計 感應(yīng)電機(jī)智能軟啟動控制器的設(shè)計
格式:pdf
大小:214KB
頁數(shù):4P
4.4
介紹80c196mc單片機(jī)的智能軟啟動控制器,利用其強(qiáng)大的功能實(shí)現(xiàn)對感應(yīng)電機(jī)軟啟動的高精度控制。通過單片機(jī)檢測電壓、電流的過零點(diǎn),依此計算出實(shí)際功率因數(shù)角,并與設(shè)定的最佳功率因數(shù)角進(jìn)行比較,及時輸出觸發(fā)脈沖,實(shí)時調(diào)節(jié)電機(jī)的電壓,達(dá)到無沖擊啟動和節(jié)能的目的。試驗(yàn)證明系統(tǒng)具有優(yōu)良的性能。
感應(yīng)電機(jī)高性能魯棒速度跟蹤控制器設(shè)計 感應(yīng)電機(jī)高性能魯棒速度跟蹤控制器設(shè)計
格式:pdf
大小:705KB
頁數(shù):6P
4.3
針對系統(tǒng)模型不確定性和干擾對矢量控制性能的影響,利用q-參數(shù)化理論設(shè)計控制器,設(shè)計了一種簡單有效的感應(yīng)電機(jī)速度控制策略。該速度控制器由魯棒轉(zhuǎn)子磁鏈估計器(rrfe)以及參考模型跟蹤控制器(rmtc)兩個部分構(gòu)成。rrfe主要用于轉(zhuǎn)子磁鏈估計,以確保轉(zhuǎn)子磁鏈獲得快速準(zhǔn)確的定向,而rmtc則在電機(jī)參數(shù)發(fā)生變化和出現(xiàn)干擾的情況下,獲得磁鏈和轉(zhuǎn)速的漸進(jìn)跟蹤性能。仿真試驗(yàn)結(jié)果表明,干擾得到有效抑制,系統(tǒng)具有較好調(diào)速性能。
感應(yīng)電機(jī)的一種輸出反饋控制器設(shè)計 感應(yīng)電機(jī)的一種輸出反饋控制器設(shè)計
格式:pdf
大小:174KB
頁數(shù):4P
4.7
感應(yīng)電機(jī)轉(zhuǎn)子磁鏈觀測是磁場定向系統(tǒng)控制中的關(guān)鍵步驟,然而電機(jī)在低速運(yùn)行時定子電阻不確定性及轉(zhuǎn)子轉(zhuǎn)速變化對轉(zhuǎn)子磁鏈觀測準(zhǔn)確性有很大的影響。采用線性變參數(shù)多胞輸出反饋控制器設(shè)計理論,提出一種新的轉(zhuǎn)子磁鏈觀測方法。引入多胞技術(shù),設(shè)計包含極點(diǎn)配置的隨變參數(shù)自調(diào)整的輸出反饋控制器。將感應(yīng)電動機(jī)作為線性變參數(shù)系統(tǒng),轉(zhuǎn)子轉(zhuǎn)速與定子電阻作為系統(tǒng)的變參數(shù),設(shè)計系統(tǒng)控制器即轉(zhuǎn)子磁鏈觀測器。利用魯棒控制理論,通過求解線性矩陣不等式組,實(shí)現(xiàn)滿足魯棒穩(wěn)定性能和動態(tài)特性轉(zhuǎn)子磁鏈觀測器。仿真結(jié)果驗(yàn)證此觀測器的正確性,磁鏈觀測的水平有了較大的提高。
感應(yīng)電機(jī)電磁轉(zhuǎn)矩性能分析與研究 感應(yīng)電機(jī)電磁轉(zhuǎn)矩性能分析與研究
格式:pdf
大小:528KB
頁數(shù):未知
4.5
本文對三相感應(yīng)電機(jī)在不同磁場定向下及六相感應(yīng)電機(jī)在梯形波相電流驅(qū)動下的電磁轉(zhuǎn)矩進(jìn)行了比較分析。比較了兩種電機(jī)在突加負(fù)載情況下的電磁轉(zhuǎn)矩響應(yīng)曲線。仿真和實(shí)驗(yàn)結(jié)果驗(yàn)證了六相感應(yīng)電機(jī)比三相感應(yīng)電機(jī)電磁轉(zhuǎn)矩脈動頻率高,幅值小,穩(wěn)定性強(qiáng)以及同等電流下產(chǎn)生電磁轉(zhuǎn)矩高的特點(diǎn)。
智能化感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)的設(shè)計 智能化感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)的設(shè)計
格式:pdf
大小:87KB
頁數(shù):1P
4.4
本文就智能化感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)的設(shè)計進(jìn)行分析,首先介紹智能化感應(yīng)電機(jī)變頻提速系統(tǒng)的概念,其次闡述了恒壓頻比變頻調(diào)速系統(tǒng)的效率優(yōu)化,最后簡單描述仿真試驗(yàn)與結(jié)果.
基于EKF的感應(yīng)電機(jī)無傳感器MRFAC控制器設(shè)計 基于EKF的感應(yīng)電機(jī)無傳感器MRFAC控制器設(shè)計
格式:pdf
大小:803KB
頁數(shù):5P
4.4
提出了一種基于擴(kuò)展卡爾曼濾波(ekf)的感應(yīng)電機(jī)(im)無傳感器模型參考模糊自適應(yīng)(mrfac)控制器的設(shè)計方法。利用ekf算法,通過測量電機(jī)的端電壓和流過定子線圈的電流在線估計電機(jī)轉(zhuǎn)子的位置和速度;利用模糊自適應(yīng)機(jī)構(gòu)替代常規(guī)自適應(yīng)機(jī)構(gòu),構(gòu)成一個模型參考模糊自適應(yīng)系統(tǒng),從而實(shí)現(xiàn)具有較強(qiáng)自適應(yīng)和抗干擾能力的感應(yīng)電機(jī)無傳感器矢量控制系統(tǒng)。仿真結(jié)果表明:該感應(yīng)電機(jī)無傳感器矢量控制系統(tǒng)具有良好的調(diào)速性能和轉(zhuǎn)矩響應(yīng)。
多相感應(yīng)電機(jī)電子變極電流控制策略 多相感應(yīng)電機(jī)電子變極電流控制策略
格式:pdf
大小:392KB
頁數(shù):8P
4.8
針對多相感應(yīng)電機(jī)斜坡響應(yīng)電子變極過程中,電機(jī)轉(zhuǎn)速跌落和轉(zhuǎn)矩波動較大的問題,采用了基于滑模變結(jié)構(gòu)電流控制的多相感應(yīng)電機(jī)電子變極方法。文中對pi和滑模變結(jié)構(gòu)控制兩種電流控制策略進(jìn)行了比較分析,在多相感應(yīng)電機(jī)矢量控制基礎(chǔ)上,用滑模變結(jié)構(gòu)電流控制器替代傳統(tǒng)的pi控制器分別控制d軸和q軸電流,解決了電子變極過程中pi電流控制跟蹤電流斜坡輸入存在的滯后性問題。并以五相感應(yīng)電機(jī)為例,對提出的方法進(jìn)行驗(yàn)證,實(shí)驗(yàn)結(jié)果表明提出的方法能有效改善多相感應(yīng)電機(jī)電子變極過程中的轉(zhuǎn)矩和轉(zhuǎn)速波動。
淺談空調(diào)用感應(yīng)電機(jī)振動和噪聲的控制措施
格式:pdf
大小:898KB
頁數(shù):1P
4.7
本文依據(jù)感應(yīng)電機(jī)振動和噪聲產(chǎn)生的根源,闡述了對電機(jī)振動和噪聲的基本控制措施。
單邊復(fù)合次級直線感應(yīng)電機(jī)多層傅利葉分析相關(guān)
文輯推薦
知識推薦
百科推薦


職位:建設(shè)項(xiàng)目環(huán)境影響評價
擅長專業(yè):土建 安裝 裝飾 市政 園林


