

基于車載CAN總線的倒車雷達單元設計
格式:pdf
大小:490KB
頁數:3P
人氣 :50
 4.3
4.3
倒車雷達在汽車中得到廣泛應用,但沒有與車載CAN總線網絡相聯系,造成其功能不完善。用PIC18F258單片機設計一個倒車雷達單元,使倒車雷達能夠被車載網絡識別,實現與CAN總線的數據通信與資源共享,完成倒車雷達的自動剎車功能。




倒車雷達安裝
格式:pdf
大小:14.5MB
頁數:19P
倒車雷達安裝 史上最詳盡的奔奔mini倒車雷達安裝過程,自己動手,豐衣足食。 倒車吃了好幾次虧,這次不得以才買了一個便宜的倒車雷達,不是可視, 下一步準備裝個多合一一體機,所以這次買個便宜的。 可視的倒車雷達也可以參照本安裝過程來自己安裝,實在,裝起來一個 小時就可以了,我是自己摸索的,所以花了2個多小時。 鉆探頭孔的電鉆我沒有,我就把車開到一個修單車的修車鋪,給了幾塊 錢找修單車的師傅幫忙鉆的。多省事阿。 56樓有更新,解決色差.不過在此提醒一下,最好買和原車色彩差不 多的,這樣噴的厚度就會薄一些,要不然完全不是一種顏色的,特別是深 色到淺色.比如橙色噴成黃色,就要噴的多一些厚一些,難免會影響探 測靈敏度. 工具:十字螺絲刀一把,2mm寬一字螺絲刀一把,電鉆一把(沒有可以 開車去找修單車鋪),小刀剪刀各一把,絕緣膠布等等 這個位置我覺最佳:倒
(整理)四線制倒車雷達探頭電氣原理圖.
格式:pdf
大小:93KB
頁數:2P
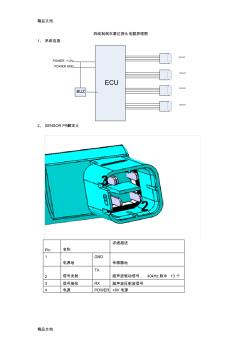
精品文檔 精品文檔 四線制倒車雷達探頭電器原理圖 1、系統連接 ecu power+12v powergnd sensor sensor sensor sensor buz 2、sensorpin腳定義 pin名稱 詳細描述 1 電源地 gnd 傳感器地 2信號發射 tx 超聲波驅動信號,40khz脈沖13個 3信號接收rx超聲波反射波信號 4電源power+8v電源 2 3 精品文檔 精品文檔 3、信號時序 40khz13個 余振 障礙物反射信號 tx rx 8v 8v 控制器tx信號腳發射+8v40khz的方波脈沖13個用于驅動sensor產生超聲波。超聲 波經過障礙物反射后反射波被sensor接收。semsor接收反射信號后經過放大濾波及 整形變成如上圖rx信號的圖像。其中余振大約1.2ms,由于障礙物不同和距離的
編輯推薦下載
四線制倒車雷達探頭電氣原理圖
格式:pdf
大小:92KB
頁數:2P
4.5
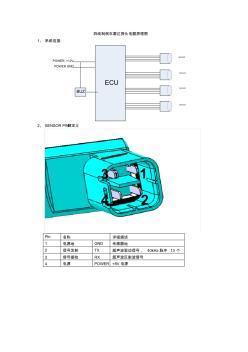
四線制倒車雷達探頭電器原理圖 1、系統連接 ecu power+12v powergnd sensor sensor sensor sensor buz 2、sensorpin腳定義 pin名稱詳細描述 1電源地gnd傳感器地 2信號發射tx超聲波驅動信號,40khz脈沖13個 3信號接收rx超聲波反射波信號 4電源power+8v電源 1 2 3 4 3、信號時序 40khz13個 余振 障礙物反射信號 tx rx 8v 8v 控制器tx信號腳發射+8v40khz的方波脈沖13個用于驅動sensor產生超聲波。超聲 波經過障礙物反射后反射波被sensor接收。semsor接收反射信號后經過放大濾波及 整形變成如上圖rx信號的圖像。其中余振大約1.2ms,由于障礙物不同和距離的原因 是障礙物反射信號強弱不同。
車載CAN總線倒車雷達單元設計熱門文檔
 基于CAN總線的汽車儀表盤電控單元設計
基于CAN總線的汽車儀表盤電控單元設計 基于CAN總線的汽車儀表盤電控單元設計
格式:pdf
大小:281KB
頁數:4P
4.4
將汽車電控單元與機械儀表盤結合,針對成本可控制和機械指針儀表讀數不準等問題,在研究汽車電子儀表技術的基礎上,設計并實現了一種應用于電子機械式汽車儀表盤顯示的電控單元。經過測試工裝測試及顯示數據對比等實驗,該電控單元能夠精確驅動汽車儀表盤進行顯示,具有實用價值。
基于CAN總線的新能源車載空調標定軟件的設計 基于CAN總線的新能源車載空調標定軟件的設計
格式:pdf
大小:1015KB
頁數:4P
4.8
針對傳統車載空調標定軟件的操作復雜、通用性差、適用人群有限等缺點,采用can總線的網絡互連方式來組織車載空調標定系統,使用標定軟件對空調、變頻器內的各參數進行在線標定、實時監測.使用c#設計的標定軟件平臺,界面簡潔,操作方便,通用性強.該軟件不僅為汽車空調控制系統提供了準確、實時的通信保證,而且也為系統檢測提供了有利的保障.
基于CAN總線的新能源車載空調標定軟件的設計 基于CAN總線的新能源車載空調標定軟件的設計
格式:pdf
大小:1.0MB
頁數:4P
4.6
針對傳統車載空調標定軟件的操作復雜、通用性差、適用人群有限等缺點,采用can總線的網絡互連方式來組織車載空調標定系統,使用標定軟件對空調、變頻器內的各參數進行在線標定、實時監測.使用c#設計的標定軟件平臺,界面簡潔,操作方便,通用性強.該軟件不僅為汽車空調控制系統提供了準確、實時的通信保證,而且也為系統檢測提供了有利的保障.
基于CAN總線的電噴系統控制單元設計 基于CAN總線的電噴系統控制單元設計
格式:pdf
大小:588KB
頁數:3P
4.6
文章介紹了摩托車發動機電噴系統控制單元(ecu)的工作原理,提出了一種基于can總線的電噴系統控制單元(ecu)的設計方案。介紹了該控制單元的硬件結構、軟件的設計方法、系統微處理器外圍串行接口(spi)與can控制器通訊的過程,分析了該電噴系統控制單元設計的優點。
基于CAN總線的機器人單元監控系統的設計 基于CAN總線的機器人單元監控系統的設計
格式:pdf
大小:790KB
頁數:5P
4.7
針對機器人制造單元現場環境復雜、監控所需數據量大,實時性、可靠性要求高的特點,設計并開發了一種基于can總線的機器人制造單元監控系統。該系統主要包含數據采集與通訊、可視化監控和信息存儲三部分。重點介紹了基于80c51的can總線節點在機器人制造單元中的軟、硬件的實現架構及其應用。實際運行表明,該系統能有效的監控機器人制造單元的運行,保證單元運行的穩定、可靠,提高機器人制造單元運行效率。
車載CAN總線倒車雷達單元設計精華文檔
 某車載雷達方位舉升控制箱的改裝設計
某車載雷達方位舉升控制箱的改裝設計 某車載雷達方位舉升控制箱的改裝設計
格式:pdf
大小:104KB
頁數:2P
4.6
主要介紹了某車載雷達方位舉升控制箱機箱的改裝設計,著重闡述了該戶外機箱的結構組成,機箱內器件布局及走線方式,并對其防雨、防塵、防鹽霧,電磁屏蔽、抗振性及熱設計等結構設計進行了充分考慮。
基于CAN總線的雷達液位儀通信模塊設計 基于CAN總線的雷達液位儀通信模塊設計
格式:pdf
大小:555KB
頁數:4P
4.4
雷達液位儀是一種非接觸式的高精度液位測量儀表。針對現有雷達液位儀不具有現場總線通信方式的現狀,設計了基于can總線的雷達液位儀通信模塊,給出了硬、軟件的設計方案,并指出了需要注意的問題,為組建基于can總線的液位測量系統打下了良好的基礎。實驗表明,該通信模塊具有結構簡單、工作穩定可靠、通信速率高等特點。
煤層氣發動機電控單元的CAN總線設計 煤層氣發動機電控單元的CAN總線設計
格式:pdf
大小:1.5MB
頁數:4P
4.8
為便于發動機電控系統更好地融入到整車通訊控制體系中,文章采用pic18f448型單片機和pca82c250型芯片,以原有煤層氣發動機電控系統為模板,對集成式的can總線通訊模塊進行了研究,完成了硬件電路和程序的設計;數據收發包括標準幀和擴展幀,均采用中斷控制方式實現。指出該can模塊可作為一個獨立的can節點使用,為煤層氣發動機ecu融入整車控制ecu的通訊體系奠定了基礎。
基于車載4線激光雷達的前方道路可行駛區域檢測??
格式:pdf
大小:1.1MB
頁數:8P
4.7
通過分析大量激光雷達數據,提出了改進的dbscan算法對雷達數據進行聚類,以使智能汽車獲得前方道路和障礙物信息。根據不同的密度參數,多次調用該算法完成多密度聚類。結合提出的道路邊沿、路面和障礙物等信息提取方法,在結構化或半結構化的城市道路中對提出的方法進行實車試驗,結果表明該算法可實時準確的提取智能汽車的可行駛區域信息。
車載CAN總線倒車雷達單元設計最新文檔
基于車載激光雷達的鐵路既有線復測技術研究 基于車載激光雷達的鐵路既有線復測技術研究
格式:pdf
大小:318KB
頁數:5P
4.8
研究目的:隨著鐵路運營里程的增加和行車速度的提升,既有線復測的工作量也日益增多.傳統的既有線復測方法存在較大的安全隱患,且工序多,作業效率較低,故急需探索一種高效、安全、實用的作業手段.研究結論:(1)車載激光雷達測量技術可以快速、實時地獲取鐵路周圍地形的空間幾何信息,對鐵路運營管理幾乎零干擾;(2)通過少量地面控制點對原始激光點云數據進行精化處理,可獲得滿足鐵路復測精度要求的海量數據;(3)獲取的數碼影像成果真實記錄了鐵路周圍的現場狀況以及公務設備情況,使得各項調查成果更加直觀可靠;(4)本研究成果可應用于既有鐵路復測、增設復線、設備維護、景觀可視化等方面,可為鐵路運營系統信息化管理創造條件.
基于車載4線激光雷達的前方道路可行駛區域檢測
格式:pdf
大小:1.1MB
頁數:8P
4.3
通過分析大量激光雷達數據,提出了改進的dbscan算法對雷達數據進行聚類,以使智能汽車獲得前方道路和障礙物信息。根據不同的密度參數,多次調用該算法完成多密度聚類。結合提出的道路邊沿、路面和障礙物等信息提取方法,在結構化或半結構化的城市道路中對提出的方法進行實車試驗,結果表明該算法可實時準確的提取智能汽車的可行駛區域信息。
CAN總線混合動力驕車電控系統的設計與實現.
格式:pdf
大小:19KB
頁數:3P
4.7
can總線混合動力驕車電控系統的設計 與實現 混合動力汽車是一種由內燃機和電動機混合驅動的汽車,其主要特點是節能、 環保。這種汽車在起步時用電動機驅動,消除了內燃機起步時由于燃燒不充分 而排黑煙的現象。在汽車減速或剎車時,利用發電機把動能轉化成電能,貯存 到蓄電池中,實現能量回收達到節能的目的。由于這種汽車是內燃機和電動機 兩種動力并存,僅用傳統的針對內燃機的電控系統無法實現兩種動力的最佳配 合,因此開發混合動力車的全新電控系統是十分必要的.本文以一種 混合動力汽車是一種由內燃機和電動機混合驅動的汽車,其主要特點是節能、 環保。這種汽車在起步時用電動機驅動,消除了內燃機起步時由于燃燒不充分 而排黑煙的現象。在汽車減速或剎車時,利用發電機把動能轉化成電能,貯存 到蓄電池中,實現能量回收達到節能的目的。由于這種汽車是內燃機和電動機 兩種動力并存,僅用傳統的針對內燃機的電控系統無法實現兩種動力
基于CAN總線的客車空調控制器設計 基于CAN總線的客車空調控制器設計
格式:pdf
大小:67KB
頁數:4P
4.5
介紹了一種基于can總線的客車空調控制器的設計方案。該方案實現了數據采集,外圍負載驅動控制,can總線傳輸,人機交互等一系列功能。滿足客車空調對功能完整性,調節舒適性的要求,具有成本低、效果好、兼容性好的特點。
 基于單片機的汽車倒車雷達設計
基于單片機的汽車倒車雷達設計 基于單片機的汽車倒車雷達設計
格式:pdf
大小:92KB
頁數:1P
4.5
隨著社會的發展進步,汽車開始普及,全民汽車時代即將到來,汽車倒車雷達是汽車上重要的裝置。本系統的原理是超聲波測距儀的發射探頭發出超聲波,當超聲波遇到障礙物后反射回來,由超聲波接收器接收,再由單片機計算出超聲波發出與返回的時間,就可以計算出汽車與障礙物的距離,當距離小于報警距離時,單片機控制蜂鳴器與數碼管顯示發出報警信號。
基于單片機的汽車倒車雷達系統設計 基于單片機的汽車倒車雷達系統設計
格式:pdf
大小:105KB
頁數:1P
4.5
隨著社會經濟的發展和交通運輸業的不斷興旺,汽車的數量在不斷地增加。交通擁擠狀況日益嚴重,撞車事件也經常發生,造成了很多的人身傷亡和經濟損失。面對這種情況,設計一種響應快、可靠性高并且比較經濟實用的汽車倒車雷達系統就顯得非常重要。本文是基于超聲波測距的汽車倒車雷達系統的設計,主要是利用超聲波的特點和優勢,將超聲波測距系統和stc89c52單片機結合于一體,設計出一種基于stc89c52單片機的倒車雷達系統。本系統采用軟硬件結合的方法,具有模塊化和多用化的特點。
基于CAN總線的車載電源設備監控網絡系統設計 基于CAN總線的車載電源設備監控網絡系統設計
格式:pdf
大小:148KB
頁數:2P
4.6
為了提高車載電子信息系統中電源設備智能化與網絡化程度,本文提出了一種基于can總線的車載電源設備監控網絡系統設計。本文對于該監控網絡系統的總體結構進行簡明的闡述,詳細介紹了監控網絡系統中上位機、下位機監控節點相關的硬件與軟件設計。
CAN總線在汽車電氣控制中的應用 CAN總線在汽車電氣控制中的應用
格式:pdf
大小:102KB
頁數:1P
4.5
時代在發展,人類也在不斷進步,人們對汽車的要求也越來越高,現在的汽車不僅僅是用來代步,更成為一種藝術品,所以人們在汽車發展方面也付出了很多的研究。為了能讓汽車行業發展越來越好,對汽車電氣控制的研究是不可或缺的。在汽車發展行業,從傳統的接線技術中一步一步發展延伸出了很多不同的技術,can總線就是其中一種運用較為廣泛的技術。
基于SJA1000的高可靠CAN總線通訊智能單元設計 基于SJA1000的高可靠CAN總線通訊智能單元設計
格式:pdf
大小:430KB
頁數:未知
4.3
can(controllerareanetwork)總線是一種現場總線,由于其具有可靠性高、抗干擾能力強和實時性強的特點,而被廣泛應用于工業控制領域。本文介紹了一種基于sja1000的高可靠can總線智能單元的設計方案。該總線智能單元可以獨立或者配合at96總線和主控制器協同工作,易于系統擴展、優化和改進,利用微處理器完成數據發送/接受和錯誤診斷處理,降低主控制器的信息處理負擔。測試表明,該高可靠can總線智能單元的設計是可行的。
車載CAN總線倒車雷達單元設計相關
文輯推薦
知識推薦
百科推薦


職位:市政工程材料員
擅長專業:土建 安裝 裝飾 市政 園林


