




 蠕動式污水管道清淤機器人
蠕動式污水管道清淤機器人 蠕動式污水管道清淤機器人
格式:pdf
大小:302KB
頁數:4P
采用模塊化方法對污水管道清淤機器人中的管道清理單元、推進艙、閥組和控制單元等模塊加以組合,并對其進行了總體方案設計,給出了機器人蠕動行走液壓油路方案,分析了其蠕動行走過程。介紹了系統上、下位機聯合控制方案,同時描述了下位機在控制系統中的功能及其對應程序流程。在此基礎上,研制了一臺污水管道清淤機器人,并對其進行了實驗。結果表明:該機器人在現有方案下能夠實現預定的設計目標,管道清理檢測質量良好,可降低工人工作強度。
城市排水管道纜控清淤機器人的研究 城市排水管道纜控清淤機器人的研究
格式:pdf
大小:1.4MB
頁數:4P
介紹了一種用于排水管道清淤的機器人機構及工作原理,該機器人采用周向120°等間距布置的三副齒輪齒條結構,由三臺電機分別控制,并且以at89s51單片機為控制核心,通過壓力傳感器mcl-l測量輪子對管壁的壓力值與設定值進行比較來實現控制適徑機構的伸縮,增強了系統的魯棒性和適應性;通過光電傳感器來檢測機器人是否到達檢查井口來實現機器人的自主性行為;用超聲波傳感器實現絞刀機構的徑向移動,以滿足不同管徑清淤的需要。方案論證表明:該系統具有結構緊湊、適應性強、牽引力大、去淤徹底等特點。
編輯推薦下載
基于模糊控制的排水管道自主清淤機器人 基于模糊控制的排水管道自主清淤機器人
格式:pdf
大小:320KB
頁數:未知
 4.5
4.5
為了替代人工完成地下排水管道清淤工作,提出一種可以在電動機的驅動下沿著排水管道自主行走,同時對伸入管內的樹枝或油污沉積形成的鈣化物進行自動清理的新型機器人。利用光電編碼器、傾角傳感器和超聲波傳感器實時檢測機器人工作狀態和作業環境的變化,并通過引入模糊控制算法,實現驅動步進電動機過載調整、機器人姿態調節以及基于載荷變化的速度調節,從而極大地提升了機器人的自主作業能力,為獲得更好的清淤效果奠定了理論基礎。
牽引式排水管道清淤機器人的研究 牽引式排水管道清淤機器人的研究
格式:pdf
大小:268KB
頁數:4P
4.3
研究了一種新型排水管道清淤機器人,對其組成及工作原理做了論述,以及對基于plc的軟、硬件控制做了詳細介紹。用鋼絲繩牽引裝置帶動清淤車體連同清淤斗完成有載清淤作業,保證清淤作業有足夠的牽引力。通過清淤機器人本體自帶動力源帶動清淤斗在管道內部空載運動,代替了傳統清淤機器人沉重的有纜作業。通過監控系統適時監控管道內部清淤作業狀況,采用無線通訊方式傳輸數據,根據作業要求完成對清淤動作的控制。
城市地下管道、河道、箱涵、水下自動清淤機器人熱門文檔
淺談城市地下管道非開挖翻襯法管道內襯修復 淺談城市地下管道非開挖翻襯法管道內襯修復
格式:pdf
大小:1.4MB
頁數:2P
4.5
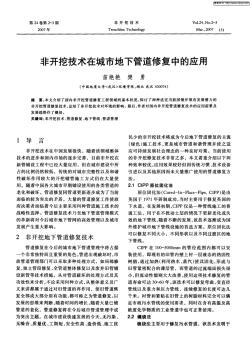
城市地下管線錯綜復雜,城市道路的負荷越來越嚴重,使得排水管線在修復的過程中存在大量的技術問題,尤其是在大都城市,城市道路的開挖越來越受限制。非開挖修復的方法整體優勢在于修復的負面影響小,修復所占用場地比較少,對地面、交通、環境以及周圍地下管線等等的影響很微弱。因此推廣非開挖修復技術在給水排水管道修復領域的運用勢在必行。
無纜式城市排水管道清淤機器人的通訊設計 無纜式城市排水管道清淤機器人的通訊設計
格式:pdf
大小:568KB
頁數:3P
4.7
根據無纜式排水管道清淤機器人的控制要求,其控制系統采用了3個s7-200plc,機器人內部的兩個plc之間利用ppi協議實現通訊,而地面plc與機器人內部plc之間則通過無線通訊完成數據傳遞。實踐證明,該設計策略很好地解決了管道清淤機器人與地面操作人員之間的信息交互問題。

2.2城市地下管道修復技術與工程實例
格式:pdf
大小:17KB
頁數:11P
4.6
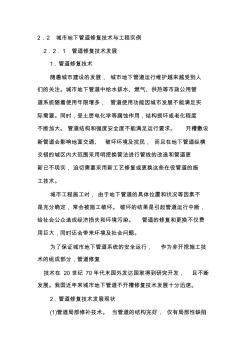
2.2城市地下管道修復技術與工程實例 2.2.1管道修復技術發展 1.管道修復技術 隨著城市建設的發展,城市地下管道運行維護越來越受到人 們的關注。城市地下管道中給水排水、燃氣、供熱等市政公用管 道系統隨著使用年限增多,管道使用功能因城市發展不能滿足實 際需要。同時,受土層電化學等腐蝕作用,結構損壞或老化程度 不斷加大。管道結構和強度安全度不能滿足運行要求。開槽敷設 新管道會影響地面交通、破壞環境及擾民,而且在地下管道縱橫 交錯的城區內大范圍采用明挖換管法進行管線的改造和管道更 新已不現實,迫切需要采用新工藝修復或更換這些在役管道的施 工技術。 城市工程施工時,由于地下管道的具體位置和狀況等因素不 是充分確定,常會被施工破壞。破壞的結果是引起管道運行中斷, 給社會公眾造成經濟損失和環境污染。管道的修復和更換不僅費 用巨大,同時還會帶來環境及社會問題。 為了保證城市地下


城市地下管道、河道、箱涵、水下自動清淤機器人最新文檔
內作業機器人管道檢測實驗系統研究
格式:pdf
大小:29.8MB
頁數:99P
4.4
??????????????ccd????????????????????????????????????????????????????20070501 ??ccd????????????????????????????????????????(1?ì1.?????????????????????????????2005????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????????
10論文正文管道履帶式機器人
格式:pdf
大小:3.7MB
頁數:48P
4.7
青島科技大學本科畢業設計(論文) 1 前言 油氣管道輸送是與鐵路、公路、水運、航運并列的五大運輸行業之一,長 輸油氣管道作為一種特殊設備廣泛應用于石油、石化、化工等工業領域以及城 市燃氣系統中,在國民經濟中占有重要地位。隨著“開發大西部”以及“西氣 東輸”的戰略指導方針,長輸油氣管道的數量在不斷增加。由于歷史原因,國 內在役長輸油氣管道中部分管材制管質量較差,加上施工建設過程中存在部分 焊接缺陷和涂層缺陷,這給管道的安全運行埋下隱患,即使部分投產驗收合格 的管道,在運行過程中也難免受到介質、溫度、疲勞、腐蝕、局部載荷等因素 影響,服役一段時間后產生缺陷或導致缺陷擴展,并可能最終發生失效,給人 民生命財產、工業生產和社會穩定構成威脅。如何檢測發現管道缺陷,事前對 含缺陷管道進行評價和預測(含缺陷管道的剩余強度評價,含缺陷管道的剩余壽 命預測),確保在役油氣長輸管道安全可靠運行是目前世界
一種新型排水管道清淤機器人控制系統的設計 一種新型排水管道清淤機器人控制系統的設計
格式:pdf
大小:2.6MB
頁數:4P
4.8
介紹了一種用于排水管道清淤和檢測的機器人機構及工作原理,該機器人采用了履帶式行走機構和管道直徑調節機構,以st89c58單片機為控制核心,通過壓力傳感器的反饋值,自主地控制管道直徑調節機構。同時對驅動電動機控制、速度傳感器以及光電編碼器在機器人中的應用進行了詳細介紹。經論證表明:該系統具有結構緊湊、適應性強、牽引力大、去淤徹底等特點。
基于AT89C51控制的排水管道清淤機器人的設計 基于AT89C51控制的排水管道清淤機器人的設計
格式:pdf
大小:186KB
頁數:3P
4.5
研究了一種新型適應管徑的排水管道清淤機器人,基于at89c51單片機,通過壓力傳感器mcl-l測量輪子對管壁的壓力值與設定值進行比較,實現機器人的魯棒性和適應性;通過光電傳感器gk-430a檢測機器人是否到達檢查井口,實現機器人的自主性和智能性;用超聲波傳感器實現絞刀機構的徑向移動,以滿足不同管徑清淤的需要。方案論證表明:該系統適應性強、工作效率高、去淤徹底。
 管道機器人彎管通過性的分析
管道機器人彎管通過性的分析 管道機器人彎管通過性的分析
格式:pdf
大小:484KB
頁數:3P
4.6
討論了管道機器人的數學模型,并且對垂直彎管和分支管道的通過性做了分析。通過建立機器人的幾何方程,使得機器人可能通過各種彎管。其結果可對機器人的動靜態特性研究提供一定的參考。
基于火炮身管測量的管道機器人 基于火炮身管測量的管道機器人
格式:pdf
大小:642KB
頁數:4P
4.4
針對帶膛線身管這一特殊的測量對象,研制了一種能自動測量火炮膛線的新型管道機器人.分析了該機器人的機構組成及工作原理,研究了其運動學和力學特性.實驗證明,該機器人測量精度達到0.002mm,多次測量的重復性誤差小于0.002mm,并且可靠性高.
可變徑管道機器人系統的設計與研究
格式:pdf
大小:422KB
頁數:4P
4.4
第41卷2013年第4期 本 欄 目 編 輯 陸 秋 云 通 用 124 可變徑管道機器人系統的 設計與研究 武 燕1,王才東2,王新杰2,牛志軍2 1 河南機電職業學院機械工程系 河南鄭州 451191 2 鄭州輕工業學院機電工程學院 河南鄭州 450002 摘要:筆者在分析管道機器人國內外發展現狀基礎上,針對管道機器人對不同管徑需求,提出了一種 雙履帶式可變徑管道機器人的總體方案。設計了機器人的驅動裝置、直徑調節機構等關鍵部件,并設 計了機器人的控制系統,該控制系統上采用了上、下位機控制結構,通過手動和自動2種控制模式, 實現機器人無級調速、前進、后退、轉彎和圖像信息采集等功能。研究結果為可變徑管道機器人的實 用化開發奠定了基礎。 關鍵詞:管道機器人;變管徑;穿纜;控制系統 中圖分類號:tp242 文獻標志碼:a 文章編號:1001-3954
可變徑煤礦管道檢測機器人的設計 可變徑煤礦管道檢測機器人的設計
格式:pdf
大小:1.4MB
頁數:4P
4.7
在煤礦生產中使用大量的管道,其質量關系到整個煤礦的安全和高效生產。為提高管道壽命,預防管道老化、腐蝕及斷裂等問題,并實現高效準確地故障診斷,筆者設計了一種可變徑管道檢測機器人,并建立了機器人三維模型,利用adams對其進行運動仿真,從而驗證了機器人在直徑為220~300mm的管道中自由行走和檢測的可行性。
城市地下管道、河道、箱涵、水下自動清淤機器人相關
文輯推薦
知識推薦
百科推薦


職位:村莊規劃設計師
擅長專業:土建 安裝 裝飾 市政 園林


