

基于變電站狀態評價的集配型巡檢機器人應用研究
格式:pdf
大小:891KB
頁數:4P
人氣 :52
 4.6
4.6
為解決多座變電站共用1臺機器人的問題,提出基于變電站狀態評價動態設置集配型機器人巡檢模式.介紹變電站智能機器人巡檢系統的結構、機器人的性能需求,分析變電站狀態評價標準、變電站狀態巡檢、機器人巡檢模式.通過實際應用對比證明:基于所研究的方法進行應用不僅保證機器人能完成變電站設備巡檢任務,還能減輕變電站運維人員的勞動強度、提高工作效率、提升設備檢測水平等.



 軌道式變電站巡檢機器人投入試運行
軌道式變電站巡檢機器人投入試運行 軌道式變電站巡檢機器人投入試運行
格式:pdf
大小:72KB
頁數:未知
一臺軌道式巡檢機器人日前在遼寧鞍山220千伏王鐵變電站投入試運行,其代替人工巡視變電站線路,可節省人力,保障人身安全,并且比其他類型巡檢機器人更具穩定性和實用性。
變電站巡檢機器人電源監測及控制系統研究 變電站巡檢機器人電源監測及控制系統研究
格式:pdf
大小:544KB
頁數:未知
為保證變電站巡檢機器人穩定、高效、持續的運行,本文提出一種應用于變電站巡檢機器人的電源監測及控制系統,該系統結構緊湊,匹配完善,能滿足變電站巡檢機器人不同設備對電源的要求,全面監測電池的運行狀態,并實現機器人的自動充電。現場工業運行表明,該系統自動化程度較高,交互性好,實用性強,能夠滿足變電站巡檢機器人長期自主運行的功能需求。
編輯推薦下載
基于變電站巡檢機器人的超聲波檢測系統的設計與實現 基于變電站巡檢機器人的超聲波檢測系統的設計與實現
格式:pdf
大小:546KB
頁數:3P
4.4
本文研究開發了一種基于變電站巡檢機器人的多超聲傳感器采集系統。系統選用一體化超聲傳感器,以單片機為控制器,設計了超聲波的發射和接收電路,完成了與機器人工控機的通信,并完成了相應的軟件程序設計。考慮到變電站的強電磁環境對電子設備的干擾影響,在電路設計上采用大量的濾波電路,提高了系統的抗干擾能力,實現了測量的實時性和準確性。變電站環境應用表明:該系統運行穩定,具有較高的測量精度,對變電站巡檢器人在變電站中的應用具有重要意義。
變電站智能巡檢機器人云臺控制系統設計 變電站智能巡檢機器人云臺控制系統設計
格式:pdf
大小:2.9MB
頁數:5P
4.7
云臺是變電站智能巡檢機器人中的關鍵組成部分,針對現有云臺產品無法滿足現場巡檢任務要求這一情況,設計了巡檢機器人云臺控制系統。首先敘述了整個系統的特點和總體設計方案;進而設計了控制系統的硬件和軟件,詳細描述了硬件系統各模塊的功能特點以及系統軟件設計過程中系統功能、控制算法和控制軟件三個方面的內容;最后通過實驗驗證了云臺控制系統控制精度良好,云臺定位準確,能夠滿足巡檢任務的要求。
變電站狀態評價的集配型巡檢機器人應用研究熱門文檔
 南方電網首臺自主研發變電站巡檢機器人即將量產
南方電網首臺自主研發變電站巡檢機器人即將量產 南方電網首臺自主研發變電站巡檢機器人即將量產
格式:pdf
大小:44KB
頁數:1P
4.8
近日,廣東電網公司電力科學研究院自主研發的變電站巡檢機器人通過型式試驗,這標志著南方電網首臺自主研發的巡檢機器人即將量產。廣東電網公司將在220千伏變電站全面推廣使用巡檢機器人。"南網智造"為機器人在電力行業的研究與應用積累了經驗、做出了示范,更勾勒出了電力系統人機共融時代的美好圖景。"巡檢機器人在國內已有近10年的應用實踐,但是,技
 變電站軌道機器人自動測溫裝置
變電站軌道機器人自動測溫裝置 變電站軌道機器人自動測溫裝置
格式:pdf
大小:120KB
頁數:1P
4.4
隨著我國經濟的快速發展,對供電企業的可靠性要求也日益增強。國家電網公司為了保證設備的安全可靠運行,提出了狀態檢修。而對運行設備進行在線紅外測溫,是狀態檢修的技術保證之一。
變電站帶電水沖洗移動機器人控制系統的研究 變電站帶電水沖洗移動機器人控制系統的研究
格式:pdf
大小:70KB
頁數:未知
4.5
由于變電站設備長期暴露在戶外環境中,因而設備的表面會出現工業污穢以及自然污穢的積累。一旦出現污閃問題,將直接威脅到變電站的正常運行。因而,使用帶電水沖洗移動機器人進行變電站的沖洗有著重要的意義。本文先對機器人總體設計進行探討,并進一步研究變電站帶電水沖洗移動機器人控制系統的設計。
變電站狀態評價的集配型巡檢機器人應用研究精華文檔

變電站巡檢機器人保護裝置識別關鍵技術研究
格式:pdf
大小:2.1MB
頁數:6P
4.6
針對現場保護裝置壓板、二次空氣開關和指示燈3個主要反映實際運行狀態的基本要素,對變電站巡檢機器人室內保護裝置巡視功能開展研究.分別提出基于顏色特征對圖像識別算法、多特征識別算法和基于灰度處理的圖像閾值分割方法,以解決變電站巡檢機器人對保護裝置識別率低的問題,填補機器人對保護裝置巡視技術方面的空白,深化機器人巡視技術的應用,適應未來無人值守變電站的發展要求.
電纜溝道智能巡檢機器人研究 電纜溝道智能巡檢機器人研究
格式:pdf
大小:169KB
頁數:未知
4.7
電纜溝道智能巡檢機器人研究,是一種基于集成檢測和自動控制技術的巡檢裝置,該裝置配置的溫濕度傳感器、熱成像儀、攝像機、微波探傷儀和電源模塊等能實現對電纜溝道的溫濕度、熱分布、空間成像、設備物理缺陷等情況的實時監控,能代替人工高效率高質量的巡檢,及時發現電纜溝內的各種安全隱患,防患于未然。
我國制造的變電站巡檢機器人達國際先進水平
格式:pdf
大小:67KB
頁數:1P
4.6
近日,山東電力研究院與天津市電力高壓供電公司簽署了《變電站設備巡檢機器人技術協議》和購銷合同,變電站設備巡檢機器人由此實現了省外市場化銷售。
我國制造的變電站巡檢機器人達國際先進水平 我國制造的變電站巡檢機器人達國際先進水平
格式:pdf
大小:76KB
頁數:1P
4.7
關技術人員正確理解和執行。 2.2.1 使用 主要包括監測裝置安裝前應該做的準備工作、 監測裝置的安裝位置、監測裝置安裝必須遵循的程 序及履行的必要手續、監測裝置的保障措施和管理 措施、監測裝置的操作與運行步驟以及監測裝置退 出運行應采取的措施和技術要求等。 2.2.2 監測裝置的檢驗 a.檢驗周期的確定 根據河北南網多年來的 運行經驗和變電站運行的實際情況,考慮了各種監 測裝置制造工藝不同的運行條件,規定:電能質量監 測裝置2a要離線檢驗1次;對工作環境惡劣的監 測裝置,必要時可每年1檢驗次;對于高可靠性且投 入運行年限短的,而現場運行環境條件相對較好的 監測裝置,可考慮根據設備狀況及制造廠的相關規 定適當延長檢驗周期,延長時間不超過1a。 b.檢驗指標的確定 目前網內裝設的電能質 量監測裝置,既有諧波、電壓不平衡度、頻率、電壓波
基于深度學習的變電站巡檢機器人道路場景識別
格式:pdf
大小:408KB
頁數:6P
4.4
為了提升變電站巡檢機器人對自身所處環境的理解能力,將深度學習技術應用于變電站巡檢機器人對道路場景的識別中,提出了一種全卷積道路場景識別網絡(roadscenerecognitionnet,rsrnet)。該網絡主要由相對淺層的編碼網絡和鏡像結構與跳層融合結構相結合的解碼網絡組成,通過編碼網絡提取圖像特征后由解碼網絡識別出圖像目標信息。通過實驗表明,本文提出的網絡在同類型網絡中識別精度及效率更高,同時在實際變電站場景中也表現出了優良的場景識別性能。
變電站狀態評價的集配型巡檢機器人應用研究最新文檔
我國制造的變電站巡檢機器人達國際先進水平
格式:pdf
大小:92KB
頁數:1P
4.4
變電站設備巡檢機器人是山東電力研究院承擔的國家“863”計劃項目,它可以攜帶紅外熱像儀、可見光ccd等有關的電站設備檢測裝置,以皇主和遙控的方式,代替人對室外高壓設備進行巡測,以便及時發現電力設備的內部熱缺陷、外部機械或電氣問題,給運行人員提供診斷電力設備運行中的事故隱患和故障先兆的有關數據,并具有對設備熱缺陷、移動物體闖入等異常情況的自動判斷和報警功能。
遠程紅外熱成像檢測技術在變電站巡檢機器人中的設計與應用研究 遠程紅外熱成像檢測技術在變電站巡檢機器人中的設計與應用研究
格式:pdf
大小:280KB
頁數:3P
4.7
本文基于遠紅外熱成像技術原理及遠紅外熱成像在應用領域中的優勢,提出變電站遠紅外熱成像巡檢機器人的設計思路,借助電力設備檢測集控中心數據平臺,可快速發現并診斷電力設備故障所在,也可應用于故障隱患預測,從而保障電力設備安全運行。
牽引變電站帶電水沖洗機器人設計
格式:pdf
大小:578KB
頁數:4P
4.4
為了提高牽引變電站絕緣子帶電水沖洗作業的安全性,針對110kv牽引變電站,設計和開發出一種全新的履帶式帶電水沖洗機器人,能夠實現旋轉和俯仰以及聯合動作。由于工作條件的要求,使用了自制旋轉接頭來保證機器人的長期可靠工作,并對沖洗效果有重要影響的噴嘴進行了設計和仿真計算。在遠程控制下,該水沖洗機器人可以替代人工完成大部分水沖洗作業,從而提高了安全性能、降低了勞動強度。
沖壓自動化生產線中工業機器人的應用研究 沖壓自動化生產線中工業機器人的應用研究
格式:pdf
大小:895KB
頁數:2P
4.7
工業機器人自動化生產線在汽車產業中得到了廣泛應用,文章分析了生產線的系統組成及特點,闡述了其總體布置和控制系統工作原理,并對安全和仿真系統做了簡要介紹,以期為沖壓自動化生產線的設計和運行提供參考和借鑒。
巡檢機器人控制系統整體軟件設計 巡檢機器人控制系統整體軟件設計
格式:pdf
大小:76KB
頁數:2P
4.3
在巡檢機器人控制系統硬件平臺上移植了μc/os-ii嵌入式操作系統;根據該控制系統的實際功能需求,進行了系統主要任務的設計與分配;最后對巡檢機器人遠程控制平臺的顯示界面進行了功能性的設計,實現電力隧道巡檢機器人遠程控制平臺與巡檢機器人硬件終端的交互功能。
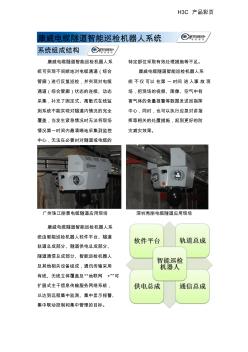
康威電纜隧道智能巡檢機器人系統介紹
格式:pdf
大小:1.4MB
頁數:3P
4.7
h3c產品彩頁 康威電纜隧道智能巡檢機器人系 統可實現不間斷地對電纜通道(綜合 管廊)進行反復巡檢,并實現對電纜 通道(綜合管廊)狀態的連續、動態 采集,補充了固定式、離散式在線監 測系統不能實現對隧道內情況的完全 覆蓋,當發生緊急情況時無法將現場 情況第一時間內最清晰地采集到監控 中心,無法在必要時對隧道或電纜的 特定部位采取有效處理措施等不足。 康威電纜隧道智能巡檢機器人系 統不僅可以在第一時間進入事故現 場,把現場的視頻、圖像、空氣中有 害氣體的含量報警等數據發送回指揮 中心,同時,也可以執行應急對講指 揮等相關的處置措施,起到更好的防 災減災效果。 廣州珠江麗景電纜隧道應用現場深圳秀麗電纜隧道應用現場 康威電纜隧道智能巡檢機器人系 統由智能巡檢機器人軟件平臺、隧道 軌道總成部分、隧道供電總成部分、 隧道通信總成部分、智能巡檢機器人 及其他相關設備組成,通訊傳輸采用 有線
用于機器人螺釘柔性裝配的夾持器 用于機器人螺釘柔性裝配的夾持器
格式:pdf
大小:547KB
頁數:未知
4.5
從機器人螺釘柔性裝配位姿調整策略的需要出發,簡要介紹了機器人末端適從方式,提出了基于剛度矩陣的適從表達方案,設計并制作出具有良好適從特性的螺釘柔順夾持器,實驗結果表明,該夾持器所具有的較寬位姿適從范圍為機器人螺釘柔性裝配的實施打下了良好基礎
介電型EAP驅動的伸縮移動機器人研究 介電型EAP驅動的伸縮移動機器人研究
格式:pdf
大小:584KB
頁數:4P
4.4
以介電型eap為驅動材料,設計、制作了一種結構緊湊的圓柱形驅動器。模仿自然界無足爬行生物的運動機理,設計了基于該驅動器的可伸縮移動機器人,實現機器人的向前伸縮運動,驗證了該介電型eap驅動器在該類型機器人中的實用性。

焊接機器人研究及應用現狀
格式:pdf
大小:16KB
頁數:5P
4.8
1焊接機器人的發展歷程 自從世界上第一臺工業機器人unimate于1959年在美國誕 生以來,機器人的應用和技術發展經歷了三個階段: 第一代是示教再現型機器人。這類機器人操作簡單,不具備外界信息的反饋 能力,難以適應工作環境的變化,在現代化工業生產中的應用受到很大限制。 第二代是具有感知能力的機器人。這類機器人對外界環境有一定的感知能 力,具備如聽覺、視覺、觸覺等功能,工作時借助傳感器獲得的信息,靈活調整 工作狀態,保證在適應環境的情況下完成工作。 第三代是智能型機器人。這類機器人不但具有感覺能力,而且具有獨立判斷、 行動、記憶、推理和決策的能力,能適應外部對象、環境協調地工作,能完成更 加復雜的動作,還具備故障自我診斷及修復能力。 焊接機器人就是在焊接生產領域代替焊工從事焊接任務的工業機器人。早期 的焊接機器人缺乏“柔性”,焊接路徑和焊接參數須根據實際作業條件預先設
變電站狀態評價的集配型巡檢機器人應用研究相關
文輯推薦
知識推薦
百科推薦


職位:駐場項目資料員
擅長專業:土建 安裝 裝飾 市政 園林


