




格式:pdf
大小:952KB
頁數: 3頁
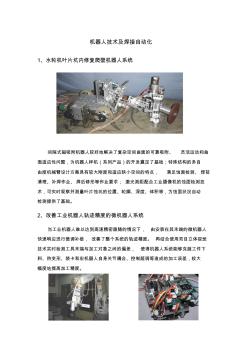
機器人技術及焊接自動化 1、水輪機葉片坑內修復爬壁機器人系統 間隙式磁吸附機器人較好地解決了復雜空間曲面的可靠吸附、 靈活運動和曲 面適應性問題,為機器人樣機(系列產品)的開發奠定了基礎;特殊結構的多自 由度機械臂設計方案具有較大剛度和適應狹小空間的特點, 滿足蝕面檢測、焊前 清理、補焊作業、焊后修形等作業要求; 激光測距配合工業攝像機的蝕面檢測技 術,可實時觀察并測量葉片蝕坑的位置、輪廓、深度、體積等,為蝕面狀況自動 檢測提供了基礎。 2、改善工業機器人軌跡精度的微機器人系統 當工業機器人難以達到高速精密跟隨的情況下, 由安裝在其末端的微機器人 快速響應進行微調補償, 改善了整個系統的軌跡精度。 再結合使用雙目立體視覺 技術實時檢測工具末端與加工對象之間的偏差, 使得機器人系統能夠克服工件下 料、熱變形、裝卡和宏機器人自身關節耦合、控制超調等造成的加工誤差,較大 幅度地提高加工精度。 3

格式:pdf
大小:457KB
頁數: 6頁
1 機 器 人 實 驗 報 告 冊 制作人:葉翔 徐培嘉 陳琳 制作日期: 2012年 12 月 2 目錄 1、中國機器人大賽雙足競步機器人比賽規則簡述 ............3 2、雙足競步機器人構成簡介 .......................3 3、功能及其改進方案簡介 .........................4 4、設計與制作軟件簡介 ...........................4 5、比賽功能簡介 .................................5 6、制作心得體會 .................................6 3 一、中國機器人大賽雙足競步機器人比賽規則簡述 1、交叉足印競步機器人: 結構只有雙足、并只能以走路的方式來移動,機器人要分清楚正面及背面, 以箭頭方向作為正面,是自主式脫線控制,用
熱門知識
自動砌磚機器人有賣-
話題: 地產家居aaa999999999
-
話題: 建筑施工shuijing741
精華知識
自動砌磚機器人有賣-
話題: 工程造價chinalong122
最新知識
自動砌磚機器人有賣-
話題: 地產家居huangwenying
相關問答
自動砌磚機器人有賣-
話題: 室內設計zhangyu911
-
話題: 工程造價piratekingl
自動砌磚機器人有賣相關專題
- 空氣開關今天老是自動跳閘
- 空氣開關經常自動跳閘
- 空氣開關自動跳閘問題
- 空氣開關總是自動跳閘
- 欄板與砼墻自動扣減嗎
- 老板牌燃氣灶火自動熄滅
- 連續自動包裝機價格多少
- 紙品全自動燙金機多少錢
- 自動報警控制電纜套管問題
- 自動翻轉陀螺原理
- 電氣工程及其自動化特色專業建設探索
- 可替代現有隔熱保溫材料的新型材料
- 在生活中構筑自然——河南天旺園林工程有限公司剪影
- 有源配電網設備利用率影響因子體系及其價值計算方法
- 有限元法在軟土淺埋隧道施工過程的動態模擬中的應用
- 張家港市旺達工業氣體有限公司企業信用報告-天眼查
- 政府和社會資本合作(PPP)項目物有所值評價
- 有關建筑工程造價管理面臨的問題與其處理手段
- 智能化技術在電氣工程自動化控制中的應用與實踐研討
- 高效率PWM/PFM自動切換升壓轉換器的設計
- 云南璟成工程項目管理有限公司-招投標數據分析報告
- 有色金屬技術經濟院與廣亞鋁業簽署戰略合作協議
- 浙江深美裝飾工程有限公司生產車間工程安全監理細則
- 含有彩色漿料和滲透墨水形成的陶瓷磚及制作方法
- 有關建設工程施工安全涉及常用法律法規標準規范清單
- 一拖一水泵智能保護水位有線無線控制配電箱使用手冊
- 有線電視網絡企業全面預算管理體系的構建與完善
- 自動切管機哪家牌子好
- 自動取水閥DN25的多少錢
- 自動三翼旋轉門不會停止
- 自動上水控制器
- 自動上水控制圖
- 自動上水器怎么使用
- 自動燒烤機多少錢一臺
- 自動伸縮門遙控不能用
- 自動伸縮門怎樣設計的
- 自動升降門的原理是什么
- 自動生成吊筋問題
- 自動售貨機大概多少錢一臺
- 自動售貨機多少錢一臺
- 自動售貨機價格
- 自動售水機2元多少升
- 自動售水機多少錢一臺
- 自動售水機和凈水機的區別
- 自動售水機價格多少錢
- 自動售水機價格問題
- 自動售水機怎樣用
- 自動售水機掙錢
- 自動刷卡道閘系統要多少錢
- 自動刷卡售水機怎么售水
- 自動水噴淋系統的組成
- 自動鎖螺絲機的工作原理
- 自動貼膜機的技術參數
- 自動貼膜機哪個牌子好
- 自動投入裝置怎么計算
- 自動無功補償器如何接線
- 自動吸水茶壺什么牌子的好