





格式:pdf
大小:16KB
頁數: 7頁
第 1章 緒論 1.1 前言 用于再現人手的的功能的技術裝置稱為 。機械手是模仿著人手的1機械手 部分動作,按給定程序、軌跡和要求實現自動抓取、搬運或操作的自動機械裝 置。在工業生產中應 用的機械手被稱為 。2工業機械手 工業機械手是近代自動控制領域中出現的一項新技術,并已成為現代機械 制造生產系統中的一個重要組成部分,這種新技術發展很快,逐漸成為一門新 興的學科 ——機械手工程。機械手涉及到力學、機械學、電器液壓技術、自動 控制技術、傳感器技術和計算機技術等科學領域,是一門跨學科綜合技術。 工業機械手是近幾十年發展起來的一種高科技自動生產設備。工業機械手 也是工業機器人的一個重要分支。他的特點是可以通過編程來完成各種預期的 作業,在構造和性能上兼有人和機器各自的優點,尤其體現在人的智能和適應 性。機械手作業的準確性和環境中完成作業的能力,在國民經濟領域有著廣泛 的發展空間。 機械手的發展
格式:pdf
大小:520KB
頁數: 3頁
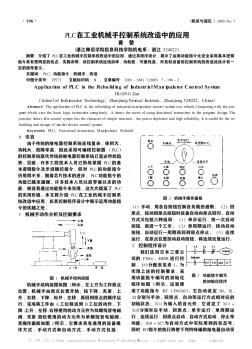
介紹了PLC在工業機械手控制系統改造中的應用,通過其程序設計,展示了運用功能指令比完全采用基本邏輯指令具有更明顯的優點。實踐表明:該控制系統連線簡單、功耗低、可靠性高;對類似設備的控制系統的改造或設計有一定的指導意義。
熱門知識
工業機械模型-
話題: 工程造價huadizongwu
精華知識
工業機械模型最新知識
工業機械模型-
話題: 地產家居luoqiang5186
相關問答
工業機械模型-
話題: 工程造價zhouji821222
工業機械模型相關專題
- 聯邦工業城有哪些電子廠
- 于都工業園3星電子廠在哪
- 一般工業用電問題
- 工業廠房配電安裝要
- 工業電熱風機的用途有哪些
- 工業廠房用電量
- 工業電源包括哪些
- 工業電鍋爐都有什么樣的
- 工業電路開關問題
- 工業插座的電壓是多少
- 中國機械工程學會授予材料熱處理工程師資格人員名單
- 新型基于熱力學法的水泵效率數學模型及應用
- 張家港市旺達工業氣體有限公司企業信用報告-天眼查
- 中國建筑防水材料工業協會
- 主要用固體工業廢渣生產硫鋁酸鹽水泥熟料的方法
- 基于閉環反饋優化的IDC基礎設施造價評估模型
- 以杉木積成材為芯板的新型細木工板的動態熱機械分析
- 中國涂料工業協會涂料裝備分會
- 以浙江省公路養護機械化的發展看筑養路機械市場需求
- 制定機械加工勞動定額切削用量時間標準若干問題
- 永修云山工業園一橫一縱道路新建工程中標候選人公示
- 醫藥工業空調帶轉輪熱回收裝置的工程設計和節能分析
- 在用工業管道定期檢驗規程.20030601doc
- 中國電器工業協會電焊機分會第七屆會員大會
- 中國國際城市市政工程機械建筑機械及施工車輛展覽會
- 中國農業機械學會
- 在線期刊——制冷空調與電力機械競爭的新著力點