





格式:pdf
大小:2.2MB
頁數(shù): 10頁
伺服電機及選型 ———————————————————————————————— 作者: ———————————————————————————————— 日期: 伺服電機 伺服電機 (servomotor)是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā) 動機。伺服電機可以控制速度,位置精度非常準確,可以將電壓信號 轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。 伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控 制,并能快速反應(yīng),在自動控制系統(tǒng)中,用作執(zhí)行元件,可把所收到 的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。 “伺服”一詞源于希臘語 “奴隸”的意思, “伺服電機”可以理解為絕 對服從控制信號指揮的電機:在控制信號發(fā)出之前,轉(zhuǎn)子靜止不動, 當(dāng)控制信號發(fā)出時,轉(zhuǎn)子立即轉(zhuǎn)動;當(dāng)控制信號消失時,轉(zhuǎn)子能即時 停轉(zhuǎn)。因此伺服電機指的是隨時跟隨命令進行動作的一種電機, 是以 其工作性質(zhì)命名的。 伺服主要靠脈沖來定位, 伺服電機接收到一個
格式:pdf
大小:180KB
頁數(shù): 7頁
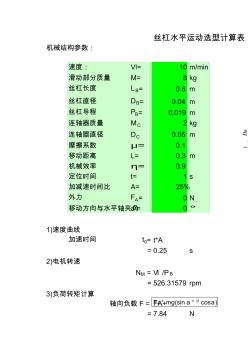
絲杠水平運動選型計算表 機械結(jié)構(gòu)參數(shù): 速度: Vl= 10 m/min 滑動部分質(zhì)量 M= 8 kg 絲杠長度 LB= 0.6 m 絲杠直徑 DB= 0.04 m 絲杠導(dǎo)程 PB= 0.019 m 連軸器質(zhì)量 MC 2 kg 連軸器直徑 DC 0.05 m 摩擦系數(shù) μ= 0.1 移動距離 L= 0.3 m 機械效率 η= 0.9 定位時間 t= 1 s 加減速時間比 A= 25% 外力 FA= 0 N 移動方向與水平軸夾角a = 0 ° 1)速度曲線 加速時間 t0= t*A = 0.25 s 2)電機轉(zhuǎn)速 NM = Vl /P B = 526.31579 rpm 3)負荷轉(zhuǎn)矩計算 FA+ = 7.84 N 軸向負載 F = (sin cos )AF mg a a = 0.0263418 Nm 4)克服慣量的加速轉(zhuǎn)矩計算(也稱做:啟動轉(zhuǎn)矩) 直線運動平臺與負載慣JL = = 7.315
熱門知識
電機如何選型-
-
-
-
話題: 地產(chǎn)家居wingyuke
精華知識
電機如何選型-
話題: 地產(chǎn)家居tesukalee
-
-
-
-
最新知識
電機如何選型-
話題: 工程造價luochong6311
-
話題: 地產(chǎn)家居letterluu
-
話題: 地產(chǎn)家居明秋水
-
話題: 工程造價duandi2010
-
相關(guān)問答
電機如何選型-
話題: 地產(chǎn)家居j11060918
-
-
話題: 工程造價niubaobao117
-
話題: 室內(nèi)設(shè)計大是大非得到
-
話題: 地產(chǎn)家居黃xiaomei
電機如何選型相關(guān)專題
- 開關(guān)磁阻電機具體工作原理
- 科勒kohler發(fā)電機怎么操作
- 科勒發(fā)電機組的公司簡介
- 科勒發(fā)電機組的工程應(yīng)用
- 科勒發(fā)電機組的科勒中國
- 可控硅充電機
- 控制電機和普通電機的區(qū)別
- 控制柜與電機的連接
- 控制XY步進電機
- 快速平移門電機有多快
- 永磁同步電機簡介
- 柘溪水電廠擴建工程發(fā)電機出口設(shè)置GCB優(yōu)越性
- 制藥用水系統(tǒng)使用點取樣閥門的應(yīng)用設(shè)計和選型論文
- 政府投資項目如何做好智能化系統(tǒng)工程建設(shè)的過程控制
- 中國電機工程學(xué)會高壓專業(yè)委員會
- 在小橋涵軟基處理中如何運用預(yù)應(yīng)力混凝土管樁的分析
- 在數(shù)控機床上通過監(jiān)視主軸電機負荷實時監(jiān)控刀具壽命
- 在樓宇自控系統(tǒng)設(shè)計中如何選擇最佳的電動調(diào)節(jié)閥口徑
- 在水利水電工程中如何解決UTM投影變形問題
- 應(yīng)急柴油發(fā)電機組安裝00D272機組冷卻方式
- 在房地產(chǎn)開發(fā)中如何運用法律防范可能發(fā)生的違約行為
- 中國電機工程學(xué)會高壓專委會
- 增設(shè)Ⅱ型電動輪汽車主發(fā)電機磁場電流監(jiān)測信號的構(gòu)思
- 制冷用大容量交叉式電磁四通換向閥的設(shè)計選型與使用
- 永磁同步電機-空調(diào)壓縮機系統(tǒng)的無傳感器過調(diào)制控制
- 應(yīng)用新型高性能水輪機轉(zhuǎn)輪對老電站水電機組增容改造
- 如何區(qū)別鋁合金門窗60、70、80系列